อาจารย์ผู้ร่วมประเมินโครงการ : ดร. กิตติ์ เธียรธโนปจัย ผศ.ดร. ดารณี หอมดี อาจารย์ที่ปรึกษาโครงการ : ดร. นวภัค เอื้ออนันต์ ผู้จัดทำโครงการ : นางสาวกันทิมา มีแหยม รหัส 493041115-9 นางสาวอทิตยาภรณ์ หมื่นน้อย รหัส 493041152-3
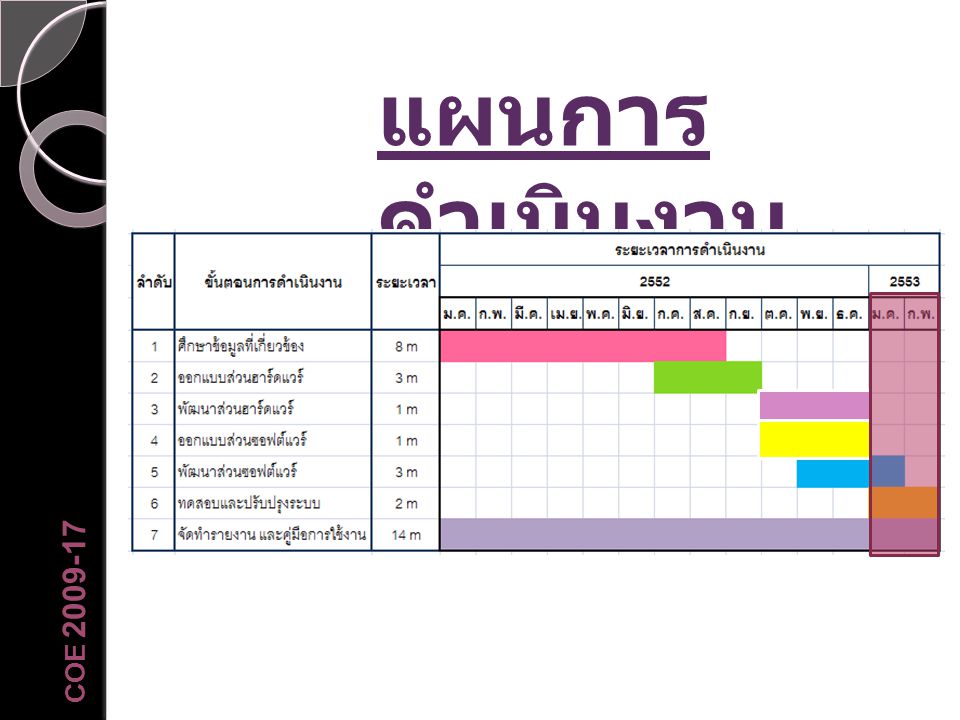
แผนการดำเนินงาน COE 2009-17
ภาพรวมของโครงการ COE 2009-17
ภาพรวมของโครงการ COE 2009-17
การพัฒนาฮาร์ดแวร์ 1 COE 2009-17
การพัฒนาฮาร์ดแวร์ ข้อต่อที่ 1 COE 2009-17
การพัฒนาฮาร์ดแวร์ ข้อต่อที่ 2 ข้อต่อที่ 3 COE 2009-17
การพัฒนาฮาร์ดแวร์ ข้อต่อที่ 4 COE 2009-17
การพัฒนาฮาร์ดแวร์ COE 2009-17 ข้อต่อที่ 5
การพัฒนาฮาร์ดแวร์ COE 2009-17
การพัฒนาฮาร์ดแวร์ COE 2009-17
วงจร Pull-Upที่มีความเสถียร การพัฒนาฮาร์ดแวร์ วงจร Pull-Up วงจร Pull-Upที่มีความเสถียร COE 2009-17
MCU พัฒนาโปรแกรมควบคุม MCU COE 2009-17 sprintf(txt, "ANG1= %4d ANG2= %4d ANG3= %4d ANG4= %4d ANG5= %4d \r\n",ANG1,ANG2 ,ANG3,ANG4,ANG5); uart0_puts(txt); MCU COE 2009-17
พัฒนาโปรแกรมควบคุม MCU void isr_int1(void) __attribute__ ((interrupt ("IRQ"))); // for GCC compiler . . . EXTINT |= 0x02; VICVectAddr = 0; //Acknowledge interrupt init(); // Initialize the system VICVectCntl1 = (0x20 | 15); // Select int source no. 15 = ext_int1, enable IRQ, Priority = 0 VICIntEnable |= (1<<15); EXTMODE |= 0x02; // Bit 1 for Ext1 to Edge sensitive; EXTINT = 0x02; VICVectAddr1 = (unsigned) isr_int1; COE 2009-17
พัฒนาโปรแกรมใช้งานบน PC COE 2009-17
พัฒนาโปรแกรมใช้งานบน PC COE 2009-17
พัฒนาโปรแกรมใช้งานบน PC COE 2009-17
การคำนวณพิกัด Y X Z COE 2009-17 translate(-F, 0, 0); rotateframez(RadANG5); translate(-E, 0, 0); rotateframey(-Math.PI / 2); rotateframex(RadANG4); // rotateX translate(-D, 0, 0); rotateframez(-RadANG3); translate(-B, 0, 0); rotateframez(RadANG2); translate(0, -A, 0); rotateframey(RadANG1); Y X COE 2009-17 Z
ทดสอบการใช้งานแขนกล
ทดสอบการใช้งานแขนกล
ทดสอบการใช้งานแขนกล
ตรวจสอบความถูกต้อง แกน X COE 2009-17
ตรวจสอบความถูกต้อง COE 2009-17
ตรวจสอบความถูกต้อง แกน Y COE 2009-17
ตรวจสอบความถูกต้อง COE 2009-17
ตรวจสอบความถูกต้อง แกน Z COE 2009-17
ตรวจสอบความถูกต้อง COE 2009-17
สรุปผลโครงการ ได้แขนกลสำหรับระบุตำแหน่ง 3 มิติ ที่มีราคาถูก และสามารถบันทึกข้อมูลลงเครื่องคอมพิวเตอร์ ได้โปรแกรมแอปพลิเคชั่นที่ใช้อ่านและวิเคราะห์องศาที่วัดได้จากแขนกลสำหรับระบุตำแหน่ง 3 มิติ ได้โปรแกรมควบคุม MCU ที่สามารถส่งข้อมูลพิกัด 3 มิติ เมื่อกดสวิตซ์เข้ามาที่เครื่องคอมพิวเตอร์ COE 2009-17
ปัญหาและอุปสรรค ทองเหลืองมีราคาแพงและมีน้ำหนักมากเกินไป 2. ไม่มีความรู้ความชำนาญในการสร้างและพัฒนา ตัวแขนกล 3. ไม่มีเครื่องมือและอุปกรณ์ที่ใช้ในการสร้างและพัฒนาแขนกล COE 2009-17
ข้อเสนอแนะ พัฒนาวัสดุอุปกรณ์ในการสร้างแขนกล สำหรับระบุตำแหน่ง 3 มิติ ที่เหมาะสม เพิ่มฟังก์ชั่นการใช้งานในโปรแกรมบน PC พัฒนาแนวทางในการหาค่าพารามิเตอร์ในแบบอื่นๆ ที่มีความแม่นยำมากขึ้น COE 2009-17
แนวทางในการพัฒนาและประยุกต์ใช้ ปรับเปลี่ยนรูปแบบการทำงาน และลักษณะรูปร่างของปลายแขนที่ทำหน้าที่เป็นหัววัดพิกัดได้ โปรแกรม 3-Dimension Digitising Arm ที่ได้พัฒนาขึ้น สามารถนำไปประยุกต์ใช้ได้กับอุปกรณ์ระบุพิกัดอื่นๆ เพิ่มฟังก์ชั่นในส่วนของกราฟิกได้ COE 2009-17
Thank you. ? COE 2009-17