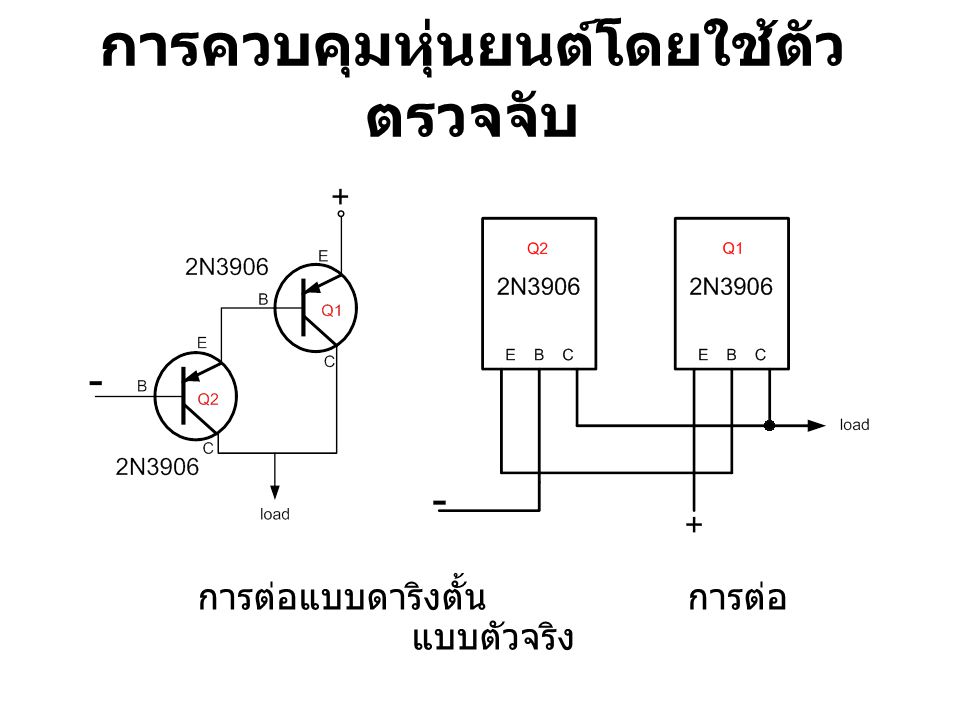
การควบคุมหุ่นยนต์โดยใช้ตัวตรวจจับ การควบคุมหุ่นยนต์โดยใช้อุปกรณ์ตรวจจับจะทำให้หุ่นยนต์มีความฉลาดหรือมีความสามารถเพิ่มขึ้น เช่น รู้ว่ามีเสียง รู้ว่ามีสิ่งของอยู่ด้านหน้า แต่การที่จะนำเอาสัญญาณจากตัวตรวจจับมาสั่งให้มอเตอร์ทำงานนั้นย่อมเป็นไปไม่ได้เพราะสัญญาณจากตัวตรวจจับมีขนาดเล็กจึ่งจำเป็นต้องมีการขยายสัญญาณเสียก่อน และใน Robot 35 in 1 นี้จะใช้ทรานซิสเตอร์แบบดาริงตั้นทำหน้าที่ขยายสัญญาณ
การควบคุมหุ่นยนต์โดยใช้ตัวตรวจจับ การต่อแบบดาริงตั้น การต่อแบบตัวจริง
การทดลองที่ 5 การทดสอบการทำงานดาริงตั้นทรานซิสเตอร์ วงจรทดสอบการทำงานของทรานซิสเตอร์
การควบคุมหุ่นยนต์โดยใช้ตัวตรวจจับ วงจรทดสอบการทำงานของทรานซิสเตอร์
การควบคุมหุ่นยนต์โดยใช้ตัวตรวจจับ วงจรทดสอบการทำงานของทรานซิสเตอร์
การควบคุมหุ่นยนต์โดยใช้ตัวตรวจจับ LDR วงจรทดสอบการทำงานของทรานซิสเตอร์
การควบคุมหุ่นยนต์โดยใช้ตัวตรวจจับ LDR วงจรสว่างไฟติด มืดไฟดับ
การทดลองที่ 6 วงจรไฟติดเมื่อสว่าง ไฟดับเมื่อมืด การทดลองที่ 6 วงจรไฟติดเมื่อสว่าง ไฟดับเมื่อมืด วงจรไฟติดเมื่อสว่าง ไฟดับเมื่อมืด
การควบคุมหุ่นยนต์โดยใช้ตัวตรวจจับ LDR วงจรสว่างไฟดับ มืดไฟติด
การทดลองที่ 7 วงจรไฟติดเมื่อมืด ไฟดับเมื่อสว่าง การทดลองที่ 7 วงจรไฟติดเมื่อมืด ไฟดับเมื่อสว่าง วงจรไฟติดเมื่อมืด ไฟดับเมื่อสว่าง
โครงงานหุ่นยนต์กลัวแสงสว่าง การทำงาน ปกติหุ่นยนต์จะวิ่ง เมื่อเจอความมืดหรือที่สว่างน้อยหุ่นยนต์จะหยุดทำงาน การต่อวงจร จะใช้การต่อวงจรแบบเดี่ยวกับวงจร สว่างไฟติด มือไฟดับ
การทดลองที่ 8 โครงงานหุ่นยนต์กลัวแสงสว่าง ทดลองต่อวงจร
แบบทดสอบความเข้าใจ 1. ให้ทดลองต่อวงจรหุ่นยนต์ กลัวความมืด (ปกติหุ่นยนต์จะไม่วิ่ง เมื่อเจอที่มืดหุ่นยนต์จะวิ่งหนีเข้าหาที่สว่าง 2. ให้ทดลองต่อหุ่นยนต์ค้นหาแสง ( ปกติหุ่นยนต์จะวิ่งปกติ เมื่อเจอความมืดหุ่นยนต์จะวิ่งเลี้ยวซ้าย)
การควบคุมหุ่นยนต์โดยใช้ตัวตรวจจับ อินฟาเรท
การควบคุมหุ่นยนต์โดยใช้ตัวตรวจจับ อินฟาเรท การทำงาน ในสภาวะปกติ LED จะติด แต่เมื่อวัตถุเข้ามาใกล้กับตัวตรวจจับ LED จะดับ
การควบคุมหุ่นยนต์โดยใช้ตัวตรวจจับ อินฟาเรท การทำงาน ในสภาวะปกติ LED จะติด แต่เมื่อวัตถุเข้ามาใกล้กับตัวตรวจจับ LED จะดับ
โครงงาน หุ่นยนต์เจอวัตถุแล้วหยุดวิ่ง การทำงาน ปกติหุ่นยนต์จะวิ่ง เมื่อเจอวัตถุอยู่ด้านหน้าใกล้กับตัวตรวจจับจะหยุดวิ่ง การต่อวงจร จะใช้การต่อวงจรแบบเดี่ยวกับวงจรตรวจจับวัตถุ
การทดลองที่ 9 โครงงาน หุ่นยนต์เจอวัตถุแล้วหยุดวิ่ง
การควบคุมหุ่นยนต์โดยใช้ตัวตรวจจับเสียง โครงงานที่ใช้แบบนี้ จะอาศัยหลักการเดียวกันคือ เมื่อมีเสียงดังจะทำให้ตัวคอนเด็นเซอร์ไมโครโพนส่งสัญญาณไปยัง ทรานซิสเตอร์ หรือ บอร์ดทดลอง ซึ่งจะทำให้มอเตอร์ทำงาน หรือหยุดทำ ก็ขึ้นอยู่กับที่เราออกแบบไว้
การควบคุมหุ่นยนต์โดยใช้ตัวตรวจจับการครบวงจร โครงงานที่ใช้แบบนี้ คือ โครงงาน หุ่นยนต์เป้าหมาย และ หุ่นยนต์สำหรวจแหล่งน้ำ โดยจะอาศัยการทำงานเมื่อครบวงจรไฟฟ้า
การควบคุมหุ่นยนต์โดยใช้ตัวตรวจจับกับบอร์ดควบคุม ในโครงงานส่วนมากจะใช้บอร์ดควบคุมร่วมกับตัวตรวจจับแบบต่างๆ เราสามารถนำขาที่ 11 ของบอร์ดควบคุมมาต่อเข้ากับตัวตรวจจับได้ โครงงานที่ใช้แบบนี้โดยมากจะเป็นโครงงานที่บังคับให้หุ่นยนต์มรการเคลื่อนที่แบบสลับไปมา เพราะต้องอาศัยการทำงานของ รีเลย์เข้าช่วยด้วย
การควบคุมหุ่นยนต์โดยใช้ตัวตรวจจับกับบอร์ดควบคุม
การควบคุมหุ่นยนต์โดยใช้ตัวตรวจจับกับบอร์ดควบคุม
การควบคุมหุ่นยนต์โดยใช้ตัวตรวจจับกับบอร์ดควบคุม การต่อรีเลย์เพื่อทำให้มอเตอร์กลับทางหมุน
การควบคุมหุ่นยนต์โดยใช้ตัวตรวจจับกับบอร์ดควบคุม การทดลองที่ 10 การต่อรีเลย์เพื่อทำให้มอเตอร์กลับทางหมุน
โครงงานหุ่นยนต์ใช้ตัวตรวจจับร่วมกับบอร์ด การทดลองที่ 11 หุ่นยนต์เมื่อเจอแสงจะวิ่งตรง เมื่อเจอความมืดจะเลี้ยวหนี
???? คำถาม ตอบข้อสงสัย ????
ก่อนจบ จากที่ได้เขารับการอบรมในวันนี้หวังว่าน้องๆคงเข้าใจการออกแบบและการประยุกต์ใช้งาน Robot 35 in 1 ได้ดียิ่งขึ้นไปอีก ห้างหุ้นส่วนจำกัด วี.ซี.พี. ซัคเซสกรุ๊ป www.vcpbook.com