ดาวน์โหลดงานนำเสนอ
งานนำเสนอกำลังจะดาวน์โหลด โปรดรอ

1
ภาควิชาวิศวกรรมคอมพิวเตอร์ คณะวิศวกรรมศาสตร์ จุฬาลงกรณ์มหาวิทยาลัย
โครงงานวิศวกรรมคอมพิวเตอร์ ระบบควบคุมวัตถุเสมือน Augmented Reality Object Manipulation System ภาควิชาวิศวกรรมคอมพิวเตอร์ คณะวิศวกรรมศาสตร์ จุฬาลงกรณ์มหาวิทยาลัย โดย นายคมกรณ์ อัศวเมฆี นายดิษพงศ์ ธชทรงธรรม อาจารย์ที่ปรึกษา ผศ.ดร.อรรถวิทย์ สุดแสง อ.ดร.นัทที นิภานันท์

2
วัตถุประสงค์ เพื่อทำให้สามารถ จับ, ผลัก และ บิด วัตถุเสมือนใน Augmented reality ด้วยมือได้ เพื่อสร้างชุดโมเดลวัตถุเสมือนจริงตัวอย่างทดสอบ 1 ชุด คือชุดของเล่นตัวต่อเสริมทักษะ

3
ภาพรวมของระบบ

4
ทฤษฎีและหลักการที่เกี่ยวข้อง
Thresholding ทฤษฎีและหลักการที่เกี่ยวข้อง

5
ทฤษฎีและหลักการที่เกี่ยวข้อง

6
ทฤษฎีและหลักการที่เกี่ยวข้อง
Center of projection Projection plane ทฤษฎีและหลักการที่เกี่ยวข้อง

7
ทฤษฎีและหลักการที่เกี่ยวข้อง
Intrinsic matrix Distortion matrix Center of projection Projection plane ทฤษฎีและหลักการที่เกี่ยวข้อง

8
ทฤษฎีและหลักการที่เกี่ยวข้อง
Augmented object ทฤษฎีและหลักการที่เกี่ยวข้อง

9
ทฤษฎีและหลักการที่เกี่ยวข้อง
Physic Engine 1 finger A’ A ทฤษฎีและหลักการที่เกี่ยวข้อง

10
ทฤษฎีและหลักการที่เกี่ยวข้อง
Physic Engine 2 fingers ทฤษฎีและหลักการที่เกี่ยวข้อง

11
ทฤษฎีและหลักการที่เกี่ยวข้อง
Physic Engine 3 fingers ทฤษฎีและหลักการที่เกี่ยวข้อง

12
โครงสร้างของซอฟต์แวร์
Hand recognition unit Physic engine unit Graphic display unit โครงสร้างของซอฟต์แวร์

13
ตัวอย่างการใช้งาน

14
ตัวอย่างการใช้งาน

15
ข้อจำกัด แสงในสภาพแวดล้อม Physic Engine
ไม่พิจารณาการชนของกันของวัตถุเสมือน วัตถุเสมือนเป็นรูปลูกบาศก์

16
เครื่องมือ Microsoft Visual Studio 2008 OpenCV OpenGL GLUT GLUI

17
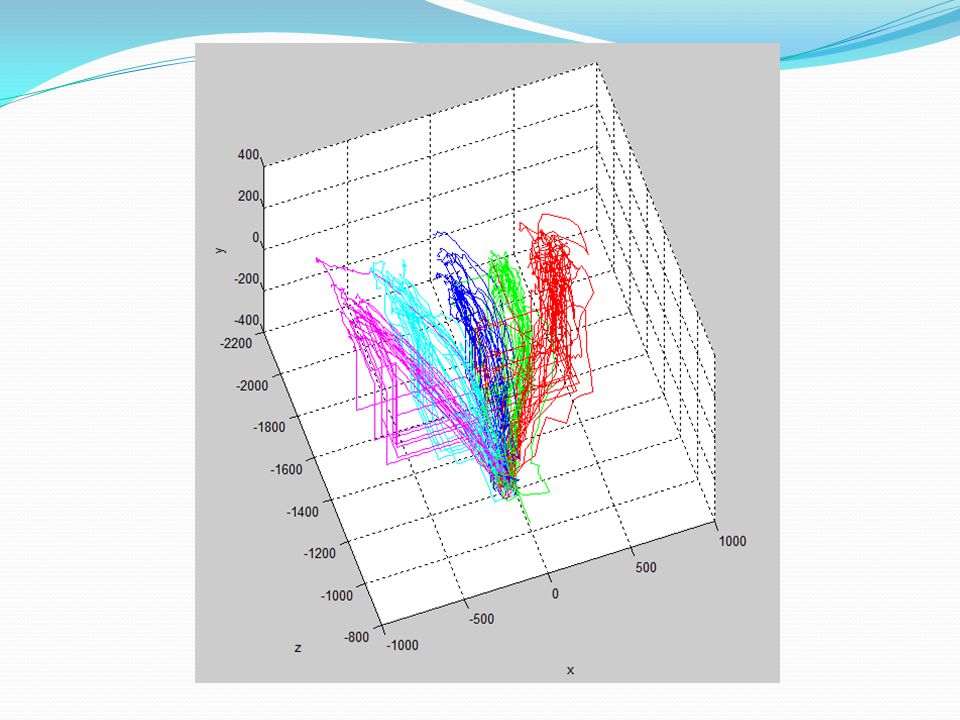
การทดลอง

18
การทดลอง

20
Average path length (in)
การทดลอง ผลลัพธ์, วิเคราะห์และ สรุปผล Average time (sec) Average path length (in) 3.5367 9.6017 3.8903
 Average path length (in)")
21
Gantt Chart

22
ปัญหา ความไม่เสถียรของค่าสี Frame rate ของระบบ การควบคุมระบบ

23
แนวทางในการพัฒนาต่อในอนาคต
ส่วนการหาปลายนิ้ว ส่วนของกล้อง ส่วนของ Physic engine ส่วนแสดงผล

24
สรุป ระบบนี้ทำให้ผู้ใช้สามารถมีปฏิสัมพันธ์เชิงกายภาพแบบสามมิติกับวัตถุเสมือนได้ ระบบแบ่งออกเป็นสองส่วนหลัก คือ ฮาร์ดแวร์ และ ซอฟต์แวร์

25
สรุป ผลลัพธ์ – ผู้ใช้สามารถควบคุมวัตถุเสมือนในสามมิติด้วย 1, 2 และ 3 นิ้วได้ ประโยชน์ พัฒนาอัลกอริทึมให้มีประสิทธิภาพมากขึ้น ใช้ร่วมกับอุปกรณ์อื่น

26
Q & A ขอบคุณครับ

งานนำเสนอที่คล้ายกัน