การหาค่าพารามิเตอร์เพื่อจำลองการทำงานของมอเตอร์เหนี่ยวนำสามเฟส P1 การหาค่าพารามิเตอร์เพื่อจำลองการทำงานของมอเตอร์เหนี่ยวนำสามเฟส กฤษ เฉยไสย ประยงค์ เสาร์แก้ว ภาควิชาวิศวกรรมไฟฟ้า คณะวิศวกรรมศาสตร์ มหาวิทยาลัยขอนแก่น จ.ขอนแก่น E-mail: krit@elec.kku.ac.th , prayong_s@thaimail.com
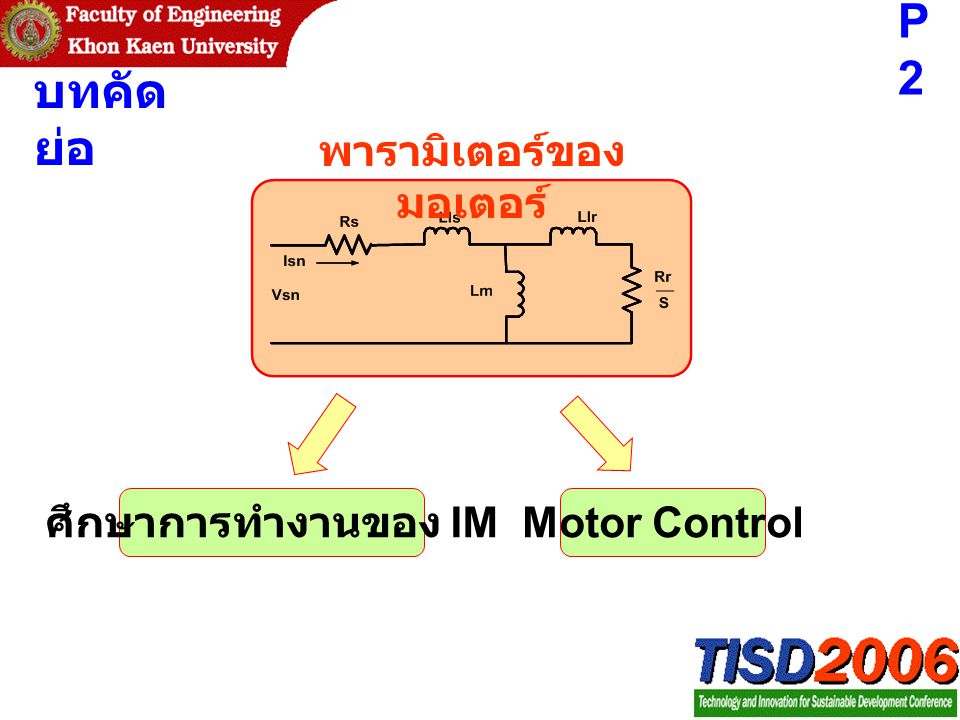
พารามิเตอร์ของมอเตอร์ P2 บทคัดย่อ พารามิเตอร์ของมอเตอร์ ศึกษาการทำงานของ IM Motor Control
วงจรเสมือนมอเตอร์เหนี่ยวนำ P3 1. บทนำ มอเตอร์เหนี่ยวนำ วงจรเสมือนมอเตอร์เหนี่ยวนำ
2. หลักการหาค่าพารามิเตอร์มอเตอร์เหนี่ยวนำ P4 2.1 มอเตอร์อยู่นิ่ง ในสภาวะที่มอเตอร์ยังไม่ทำงาน จากโครงสร้างของมอเตอร์สามารถประมาณค่าความต้านทานสเตเตอร์ ได้จากการวัดค่าความต้านทานขดลวดสเตเตอร์โดยใช้โอห์มมิเตอร์ P4
มอเตอร์จะหมุนที่ความเร็วรอบสูงสุด ประมาณว่า s =0 และ Rs << XLm 2.2 มอเตอร์ทำงานที่สภาวะไม่มีโหลด มอเตอร์จะหมุนที่ความเร็วรอบสูงสุด ประมาณว่า s =0 และ Rs << XLm P5
P6 2.3 มอเตอร์ทำงานที่สภาวะโรเตอร์ถูกล็อคไม่ให้หมุน ค่าสลิป ( S=1) ของมอเตอร์จะมีค่าเป็นหนึ่ง P6
P7 ดังนั้น ค่าความต้านทานโรเตอร์คำนวณจากสมการ ค่าความเหนี่ยวนำในวงจร โดยทั่วไปจะประมาณค่าความเหนี่ยวนำรั่วสเตเตอร์เท่ากับค่าความเหนี่ยวนำรั่วโรเตอร์ P7
3. การจำลองการทำงานมอเตอร์เหนี่ยวนำ P8 จำลองการทำงานโดยใช้ไดนามิคโมเดล( Dynamic Model )ที่มีแกนอ้างอิงบนแกนหมุนซิงโครนัส ( Synchronously rotating references model ) P8
4. การทดสอบมอเตอร์เหนี่ยวนำ P9 4. การทดสอบมอเตอร์เหนี่ยวนำ เมื่อนำไปทดสอบหาค่าพารามิเตอร์ของมอเตอร์เหนี่ยวนำ ยี่ห้อ Mitsubishi รุ่น SF-JR ขนาด 3 , 2 Hp , 4 pole , 380 V , 3.5 A , 50 Hz , 1450 rpm 4.1 มอเตอร์อยู่นิ่ง วัดค่าความต้านทานของขดลวดสเตเตอร์โดยใช้ดิจิตอลโอห์มมิเตอร์ได้
P10 4.2 มอเตอร์ทำงานที่สภาวะไม่มีโหลด ผลการวัดค่าแรงดันและกระแสเฟสของมอเตอร์ Vun = 218.6 Vrms Iu = 1.79 A , f = 50 Hz , p.f. = 0.06 , = 86.4
P11 4.3 มอเตอร์ทำงานที่สภาวะโรเตอร์ถูกล็อคไม่ให้หมุน ผลการวัดค่าแรงดันและกระแสเฟสของมอเตอร์ Vun = 19.12 Vrms Iu = 1.42 A f = 50 Hz p.f. = 0.368 , = 68.4
รูปที่ 8 กระแสเฟสของมอเตอร์ P12 4.4 ผลการจำลองการทำงาน รูปที่ 8 กระแสเฟสของมอเตอร์ I = 3.5 A ( rated ) Error = 5.87 %
รูปที่ 9 เฟสของแรงดันและกระแสของมอเตอร์ P13 รูปที่ 9 เฟสของแรงดันและกระแสของมอเตอร์
รูปที่ 10 ความเร็วรอบของมอเตอร์ P14 รูปที่ 10 ความเร็วรอบของมอเตอร์ speed = 1450 rpm ( rated ) Error = 1.03 %
รูปที่ 11 แรงบิดของมอเตอร์ P15 รูปที่ 11 แรงบิดของมอเตอร์
รูปที่ 12 สลิปของมอเตอร์ P16 รูปที่ 12 สลิปของมอเตอร์
รูปที่ 13 ทางเดินเส้นแรงแม่เหล็กที่สเตเตอร์ P17 รูปที่ 13 ทางเดินเส้นแรงแม่เหล็กที่สเตเตอร์
รูปที่ 14 ขนาดกระแสที่สเตเตอร์และโรเตอร์ P18 รูปที่ 14 ขนาดกระแสที่สเตเตอร์และโรเตอร์
P19 เปรียบเทียบมอเตอร์ทำงานที่สภาวะไม่มีโหลด Vun=218.6Vrms , Iu=1.69 A , f=50Hz ผลการ Simulation Vun = 218.6 Vrms Iu = 1.79 A , f = 50 Hz ผลการวัดค่าแรงดันและกระแสเฟสของมอเตอร์ Error=5.58%
P20 เปรียบเทียบมอเตอร์ทำงานที่สภาวะโรเตอร์ถูกล็อคไม่ให้หมุน Vun = 19.12 Vrms , Iu = 1.42 A , f = 50 Hz ผลการวัดค่าแรงดันและกระแสเฟสของมอเตอร์ ผลการ Simulation Vun=19.12 Vrms , Iu=1.45 A , f=50Hz Error=2.11%
P21 5. สรุป การหาค่าพารามิเตอร์ของมอเตอร์เหนี่ยวนำที่นำเสนอเป็นวิธีอย่างง่ายไม่ยุ่งยากและสามารถนำไปจำลองการทำงานบนเครื่องคอมพิวเตอร์ได้จริง สามารถศึกษาลักษณะของแรงดัน กระแส ความเร็วรอบ แรงบิด สลิป และเส้นแรงแม่เหล็กของมอเตอร์ได้ และให้ผลลัพธ์ที่ใกล้เคียงกับคุณสมบัติของมอเตอร์ที่ปรากฏบนเนมเพลท โดยมีค่าความผิดพลาดของกระแสเฟสที่ 5.87% และค่าความผิดพลาดของความเร็วที่ 1.03% เท่านั้น ซึ่งถือว่ามีความผิดพลาดน้อยมาก
ผู้เข้าร่วมฟังบรรยายทุกท่าน P22 ขอขอบคุณ ผู้เข้าร่วมฟังบรรยายทุกท่าน