2. การเคลื่อนที่แบบหมุน 2. การเคลื่อนที่แบบหมุน
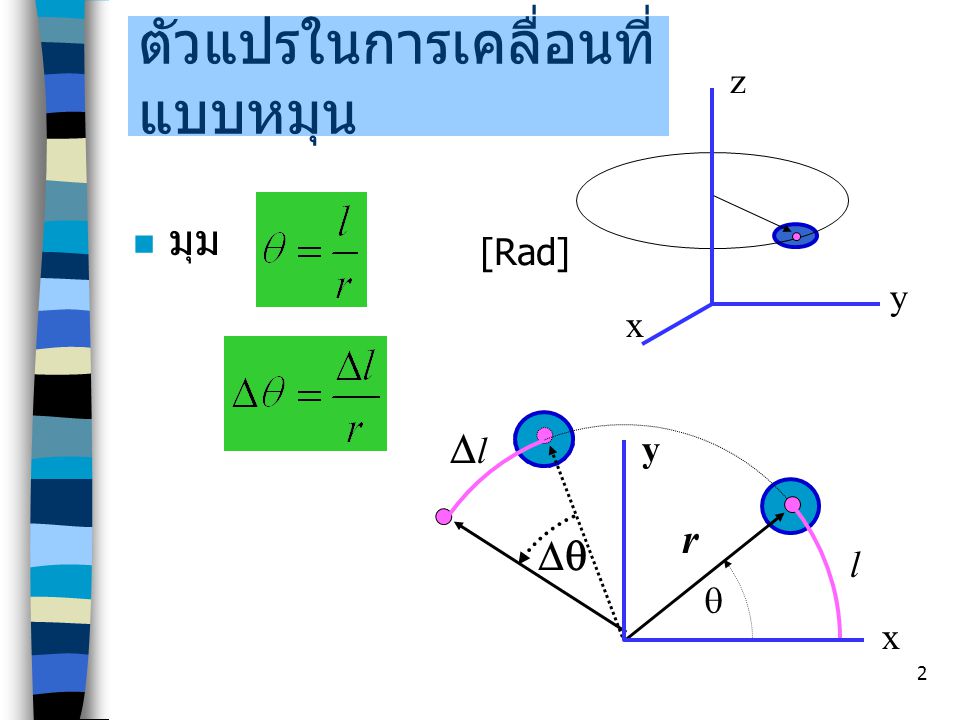
ตัวแปรในการเคลื่อนที่แบบหมุน z มุม [Rad] y x Dl y r Dq l q x
Dl Dl Dl y Dq [Rad/s] Dq Dq ความเร็วเชิงมุม x z y x
x Dq Dl y ความเร่งเชิงมุม [Rad/s2] z aT y x
“ความเร็ว เปลี่ยนขนาด เกิดความเร่งสัมผัส” v1 v2 r1 r2 “ความเร็ว เปลี่ยนขนาด เกิดความเร่งสัมผัส” v1 v2 DV r1 r2 Dr “ความเร็ว เปลี่ยนทิศ เกิดความเร่งสู่ศูนย์กลาง” anet aC aT
การหมุนที่มี a คงที่ = คงที่ w w w w0 t
Ex ล้อขนาดรัศมี 30 cm ถูกเร่งจากหยุดนิ่งด้วย a คงที่ 0 Ex ล้อขนาดรัศมี 30 cm ถูกเร่งจากหยุดนิ่งด้วย a คงที่ 0.6 rad/s2 จงหาความเร่งสุทธิของจุดๆหนึ่งที่ขอบล้อขณะที่วิ่งไปได้ 2 วินาที w v w = w0+a t = 0.6(2) = 1.2 rad/s aC = v2/r = w2r =1.22 0.3 = 0.43 rad/s2 aT = ar =0.18 rad/s2 anet = (0.43 2 + 0.18 2 )1/2 = 0.46 rad/s2 aC aT anet 23o
ความเฉื่อยต้านการหมุน (รอบจุดอ้างอิง) พลศาสตร์ของการหมุน y FT (จุดอนุภาค) aT m r q x โดยที่ I - moment of inertia ความเฉื่อยต้านการหมุน (รอบจุดอ้างอิง)
กรณีวัตถุเกร็ง FT R aT,1 m1 r1 o
Download ได้จาก web
Ex จงหาความตึงในเส้นเชือกและ ความเร่งเชิงมุมของแผ่นจาน 2.0 kg 10 cm T mg 10.0 kg
T a R (เชือกไม่ยืด-หด) M T mg a Rad/s2
โมเมนตัมเชิงมุม q pr r o ผลจาก P ตามแนวกวาดมุม
เป็นจริงเฉพาะบางรูปทรงและบางลักษณะการหมุน O w ri vi pi mi L0 เป็นจริงเฉพาะบางรูปทรงและบางลักษณะการหมุน
การอนุรักษ์โมเมนตัมเชิงมุม และ “อัตราการเปลี่ยนแปลงโมเมนตัมเชิงมุมมีค่าทอร์คสุทธิ” “ถ้าไม่มีภายทอร์คเนื่องจากแรงภายนอกกระทำ โมเมนตัมเชิงมุมระบบมีค่าคงที่เสมอ”
ขณะที่แมวบิดตัวกลับลงสู่พื้นในท่ายืน อนุรักษ์โมเมนตัมเชิงมุม หรือไม่? ขณะที่แมวบิดตัวกลับลงสู่พื้นในท่ายืน อนุรักษ์โมเมนตัมเชิงมุม หรือไม่? ท่อนหัวและท่อนหาง บิดตัวในทิศตรงกันข้าม Download ได้จาก web
Physics of ballet กางมือออก เริ่มต้น หมุน การหมุนหยุดลง หดมือเข้า หมุนต่อ