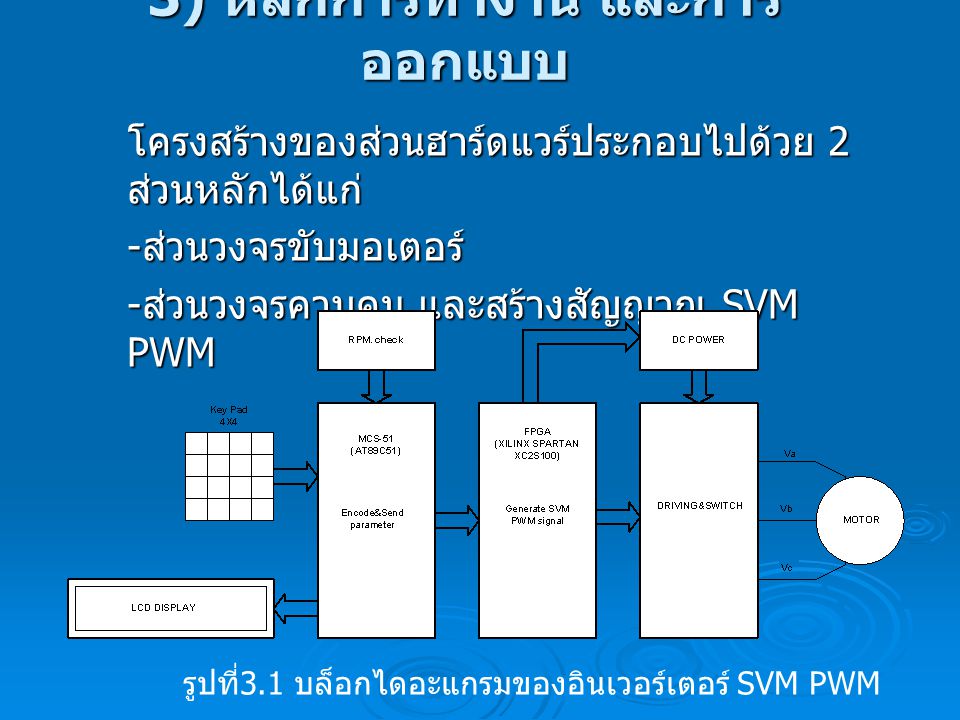
3) หลักการทำงาน และการออกแบบ โครงสร้างของส่วนฮาร์ดแวร์ประกอบไปด้วย 2ส่วนหลักได้แก่ -ส่วนวงจรขับมอเตอร์ -ส่วนวงจรควบคุม และสร้างสัญญาณ SVM PWM รูปที่3.1 บล็อกไดอะแกรมของอินเวอร์เตอร์ SVM PWM
3.1 การออกแบบวงจรภาคขับสวิตช์ IGBT
3.2การออกแบบวงจรแปลงแรงดัน และป้องกันการลัดวงจรของสวิตช์ รูปที่3.3 วงจรแปลงระดับแรงดัน
3.2การออกแบบวงจรแปลงแรงดัน และป้องกันการลัดวงจรของสวิตช์ รูปที่3.3 วงจรป้องกันการลัดวงจรของสวิตช์
3.3 การออกแบบวงจรทวีแรงดัน รูปที่3.4 วงจรเร็กติไฟเออร์และทวีแรงดัน
รูปที่3.5 วงจรรวมชุดขับของอินเวอร์เตอร์ที่ใช้ในการทดลอง วงจรรวมชุดขับสัญญาณ รูปที่3.5 วงจรรวมชุดขับของอินเวอร์เตอร์ที่ใช้ในการทดลอง
3.4 การออกแบบไมโครคอนโทรลเลอร์เพื่อรับค่าพารามิเตอร์ รูปที่3.6 บล็อกไดอะแกรมส่วนรับ-ส่งค่าพารามิเตอร์เพื่อส่งให้ FPGA
3.4 การออกแบบไมโครคอนโทรลเลอร์เพื่อรับค่าพารามิเตอร์ รูปที่3.7 วงจรไมโครคอนโทรลเลอร์ AT89C51
3.5 การออกแบบส่วน FPGA การออกแบบ FPGA เพื่อทำหน้าที่สร้างสัญญาณ PWM เพื่อใช้ควบคุมชุดขับ IGBT โดยจะมีการสร้างสัญญาณทั้งหมด 6 เส้น คือ และใช้เป็นพอร์ทสำหรับการรับค่าอินพุทจาก ไมโครคอนโทรลเลอร์ MSC-51 จำนวน 14 พอร์ท และใช้เป็นส่วนของสัญญาณPWM ที่สร้างออกมาเพื่อขับ IGBT จำนวน 6 พอร์ทโดยในส่วนนี้ได้เลือกใช้งานอุปกรณ์ FPGA ของ XILINX SPATAN II XC2S1000
3.5 การออกแบบส่วน FPGA แสดงคุณสมบัติของ Spartan-II FPGA XC2S100 Logic cell = 2700 cells System Gates(Logic and RAM) = 100000 CLB Array(R xC) = 20x30 Total CLBs = 600 Maximum Available User I/O = 176 Total Distributed RAM Bits = 38400 Total Block Bits = 40K Clock frequency operate Up to 200MHz
รูปที่3.8 แสดงบล็อกไดอะแกรมโครงสร้างภายใน 3.5 การออกแบบส่วน FPGA รูปที่3.8 แสดงบล็อกไดอะแกรมโครงสร้างภายใน
รูปที่3.9 บอร์ดอเนกประสงค์ที่ใช้สร้างสัญญาณ PWM 3.5 การออกแบบส่วน FPGA รูปที่3.9 บอร์ดอเนกประสงค์ที่ใช้สร้างสัญญาณ PWM
รูปที่3.10 วงจรรวมของบอร์ดอเนกประสงค์ 3.5 การออกแบบส่วน FPGA รูปที่3.10 วงจรรวมของบอร์ดอเนกประสงค์
รูปที่4.1 บล็อกไดอะแกรมส่วนรับ-ส่งค่าพารามิเตอร์เพื่อส่งให้ FPGA 4) การออกแบบโปรแกรม 4.1 การออกแบบส่วนไมโครคอนโทรลเลอร์ส่งค่าพารามิเตอร์ให้ FPGA รูปที่4.1 บล็อกไดอะแกรมส่วนรับ-ส่งค่าพารามิเตอร์เพื่อส่งให้ FPGA
4.1 การออกแบบส่วนไมโครคอนโทรลเลอร์ ตัวแปรใน MCS-51 ตัวแปรใน FPGA ค่าช่วงตัวแปร ที่MCS-51ส่งให้ FPGA ความหมายตัวแปร M M_index 10-1000 ดรรชนีการมอดูเลต S Step 10-500 ความถี่มอเตอร์ P pshift 0-359 เฟสชิป T 1-1000 ความถี่การสวิตช์ D dtime 1-100 Dead time ตารางที่4.1 กำหนดตัวแปรที่แสดงบนจอแอลซีดี และช่วงค่าพารามิเตอร์
4.1 การออกแบบส่วนไมโครคอนโทรลเลอร์ ตัวแปร ค่า M_index 000 Step 001 Pshift 010 T 011 dtime 100 ตารางที่4.2 ตัวแปรเทียบกับค่าเลขฐานสอง
4.1 การออกแบบส่วนไมโครคอนโทรลเลอร์
4.2 การออกแบบสัญญาณ SVM PWM ของ FPGA รูปที่4.8 ฟังก์ชั่นบล็อคในการออกแบบระบบ 3เฟส
4.2 การออกแบบสัญญาณ SVM PWM ของ FPGA รูปที่4.8 ฟังก์ชั่นบล็อคในการออกแบบระบบ 1เฟส
4.2 การออกแบบสัญญาณ SVM PWM ของ FPGA T = ระยะเวลาการสุ่ม = สัญญาณนาฬิกาของ FPGA = ความถี่การสวิตช์ = ความถี่มูลฐานของไฟฟ้าสลับ = ความละเอียดของ ROM = 512 ระดับ (9 Bit) STEP = Memory incremental step
