ดาวน์โหลดงานนำเสนอ
1
INC341 Second Order Systems & Block Diagram Reduction
Lecture 4

2
1st order review Time constant = 1/a
Settling Time (Ts) = 4 เท่าของ time constant
 = 4 เท่าของ time constant.")
3
Type of Systems First-order Systems Second-order Systems
Higher-order Systems

4
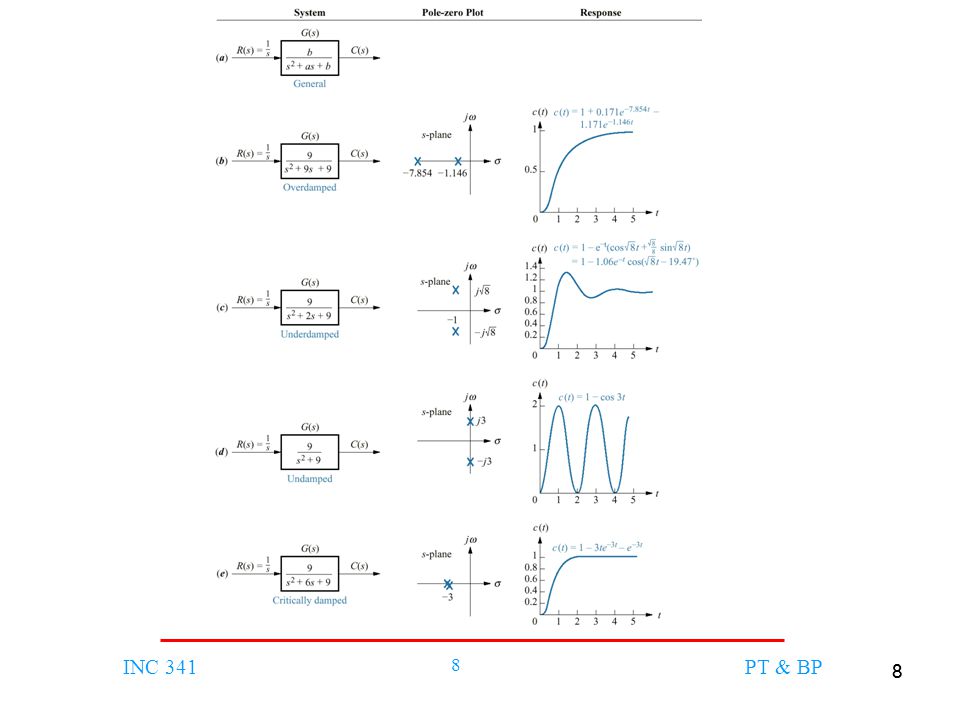
Second-order Systems ระบบที่มี 2 poles ตัวอย่างเช่นดังรูป
จะพิจารณา Output ที่ได้ จากการป้อน Input เป็น unit step u(t)
")
5
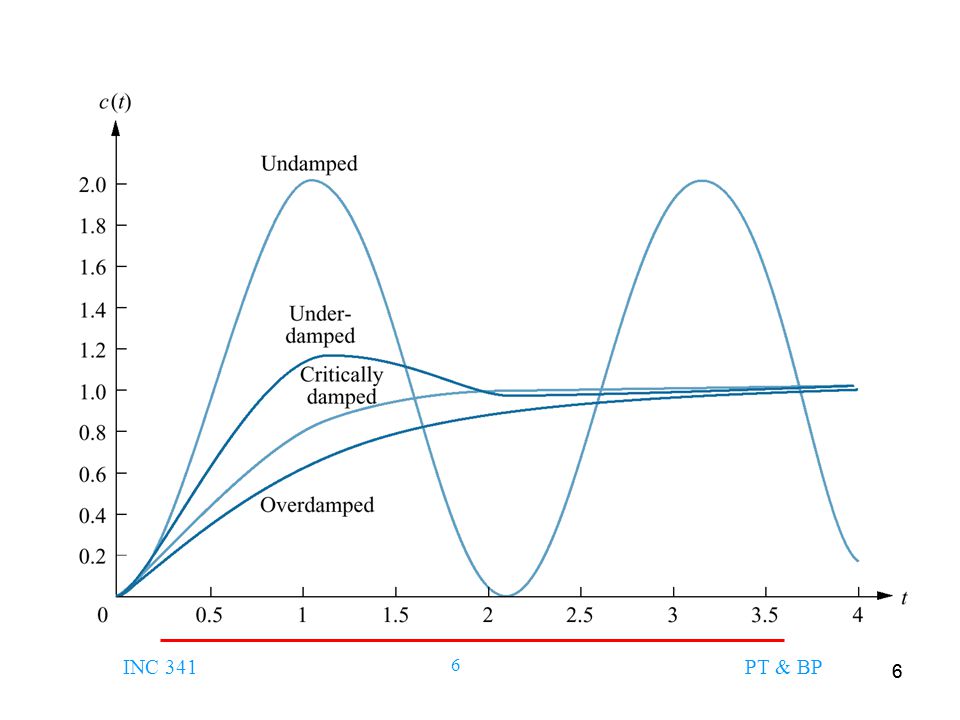
Nature of response for 2nd order systems
พิจารณาตามตำแหน่งของ poles (ลักษณะกราฟ) แบ่งได้เป็น 4 cases Overdamped response: all poles on real axis Underdamped response: complex poles on left-half plane Undamped: complex poles on imaginary axis Critically damped: repeated roots on real axis
 แบ่งได้เป็น 4 cases. Overdamped response: all poles on real axis. Underdamped response: complex poles on left-half plane. Undamped: complex poles on imaginary axis. Critically damped: repeated roots on real axis.")
7
Overdamped Underdamped Undamped Critically damped

9
การจะดูว่าอยู่ใน case ไหน ให้ดูที่ตำแหน่งของ poles เช่น
เป็น underdamped

10
General form of Second-order Systems
Natural frequency Damping ratio Undamped natural frequency (rad/sec) Damping ratio (unitless)
 Damping ratio (unitless)")
11
ดังนั้น ζ เป็นตัวกำหนดชนิดของ response ต่างๆได้
Poles สามารถหาได้เท่ากับ ดังนั้น ζ เป็นตัวกำหนดชนิดของ response ต่างๆได้

12
Natural Frequency x Distance from origin is natural frequency x
Frequency at which system would oscillate if all damping was removed, i.e., frequency of oscillation of a series RLC circuit with the resistance shorted would be the natural frequency.

13
Damped Natural Frequency
x Imaginary component is damped natural frequency x Frequency at which system actually oscillates

14
Damping Ratio ζ = x/ω x ω Angle x x

16
Damping factor Effect

17
Example 4.4 จงบอกชนิดของ response ในแต่ละ system Clue: overdamped
critically damped underdamped จงบอกชนิดของ response ในแต่ละ system Clue:

18
System Specifications
Peak time, Tp: Time to reach maximum peak. Percentage overshoot, %OS: The amount that the waveform overshoots the steady state of final value

19
ทั้ง 3 อย่างนี้มีความสัมพันธ์กับ poles
Settling time Ts: Time required for oscillations to be bounded within 2% of steady state value Tp ทั้ง 3 อย่างนี้มีความสัมพันธ์กับ poles b %OS=b/a × 100% a

20
Line of Constant Decay Rate
Real part of pole gives rate of decay All poles lying on the same vertical line will decay at same rate x Settling time Ts x

21
Line of Constant Frequency
Imaginary part of pole gives oscillation frequency All poles lying on same horizontal line in s-plane have same oscillation frequency x

22
Lines of constant damping
Poles on radial lines extending out from origin have same damping ratio x x

23
Same settling time Same peak time Same % overshoot

24
Time constant and damped frequency
Time constant (second): หาได้จาก reciprocal of real part of dominant pole Damped frequency of oscillation (radian): หาได้จาก imaginary part of dominant pole Note: dominant pole คือ pole ตัวที่อยู่ใกล้ imaginary axis มากที่สุด ซึ่งก็คือ pole ตัวที่มีผลต่อระบบมากที่สุดนั่นเอง
: หาได้จาก reciprocal of real part of dominant pole. Damped frequency of oscillation (radian): หาได้จาก imaginary part of dominant pole. Note: dominant pole คือ pole ตัวที่อยู่ใกล้ imaginary axis มากที่สุด ซึ่งก็คือ pole ตัวที่มีผลต่อระบบมากที่สุดนั่นเอง.")
25
Questions Q: จงบอกชนิดของ response พร้อมทั้งหา time constant และ damped frequency ของระบบต่อไปนี้

26
ตำแหน่ง poles บอกอะไรบ้าง
Real part: บอกถึง settling time โดยที่ pole ตัวที่อยู่ใกล้ origin มากสุด, จะมี settling time มากสุด, จะทำให้เกิดผลตอบสนองต่อระบบช้าที่สุด เราเรียก pole ตัวนี้ว่า dominant pole ซึ่งเป็น pole ที่มีความสำคัญที่สุดในระบบ Imaginary part: บอกถึงลักษณะการสั่นของสัญญาณตอบสนองที่จะเกิดขึ้น ซึ่งหมายถึง % overshoot และ peak time

27
Effect of Zero’s Position
Zeros จะมีผลมากถ้ามันอยู่ใกล้ dominant poles (pole-zero cancellation) เช่น ระบบที่มี poles ที่ -1±j2.828 ถ้าเพิ่ม zero ณ ที่ต่างๆจะได้ผลตามรูป
 เช่น ระบบที่มี poles ที่ -1±j2.828 ถ้าเพิ่ม zero ณ ที่ต่างๆจะได้ผลตามรูป.")
28
Example Poles อยู่ที่ -3±j7 ให้หา Tp, Ts, %OS

29
Type of Systems First-order Systems Second-order Systems
Higher-order Systems

30
Higher-Order System จะประมาณเป็น second-order systems โดยดูจาก dominant poles Dominant poles คือ 2 poles ที่อยู่ใกล้แกนตั้งมากที่สุด Example 1 Overdamped Example 2 Underdamped

31
(∞) = Case III
 = Case III")
32
Nise’s Proposition ถ้า poles ไกลกว่า dominant poles 5 เท่าของแกนจำนวนจริง จะถือว่าตัดทิ้งไปได้

33
conclusions ในบทนี้จะศึกษา response ของระบบในช่วง transient เท่านั้น ซึ่งเน้นศึกษาแค่ 1st and 2nd order systems Terms ต่างๆที่สำคัญๆคือ time constant, settling time (4 times of time constant), dominant pole, natural frequency, damping ratio (ส่งผลให้เกิด response แตกต่างกันออกไป) ตำแหน่ง poles และ zeros มีผลต่อผลตอบสนองของระบบอย่างไร
, dominant pole, natural frequency, damping ratio (ส่งผลให้เกิด response แตกต่างกันออกไป) ตำแหน่ง poles และ zeros มีผลต่อผลตอบสนองของระบบอย่างไร.")
34
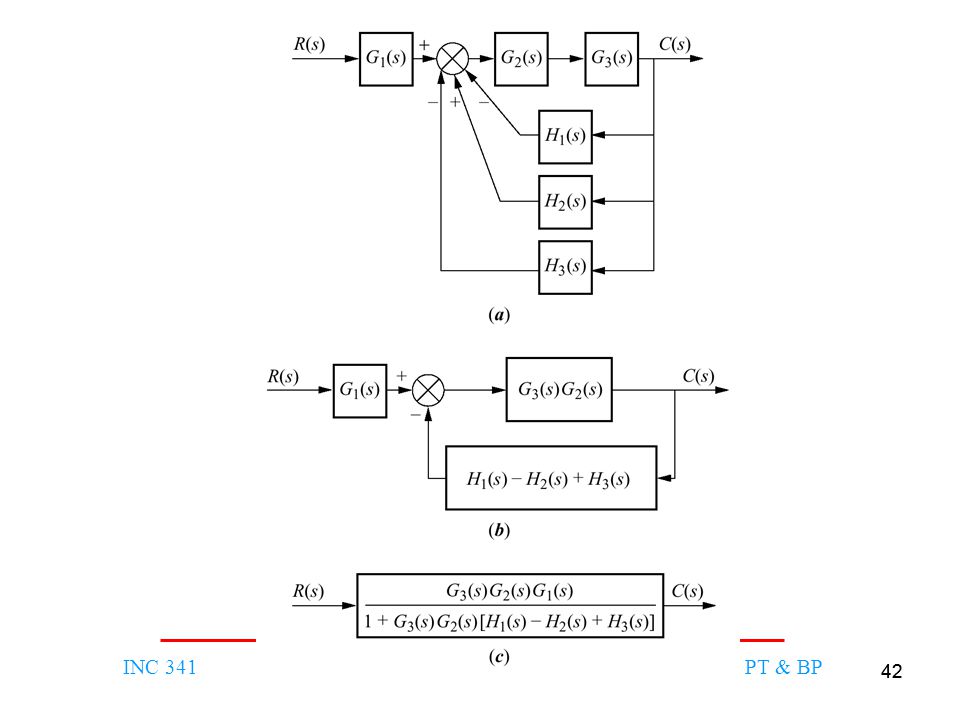
Multiple Subsystems and Reduction
หา specification ของระบบ แบ่งเป็นส่วนๆและวาด Block Diagram มองระบบรวมและเขียน Schematics วิเคราะห์ด้วย ทฤษฎี ลดรูป Block Diagram หา transfer function ของแต่ละ block

35
Block Symbols

36
Cascade Connections

37
Parallel Connections

38
Feedback Loop

39
Box-moving Technique Move pass summing junction

40
Move pass pick-off point

41
Example ให้ลดรูปจนเหลือ block เดียว

43
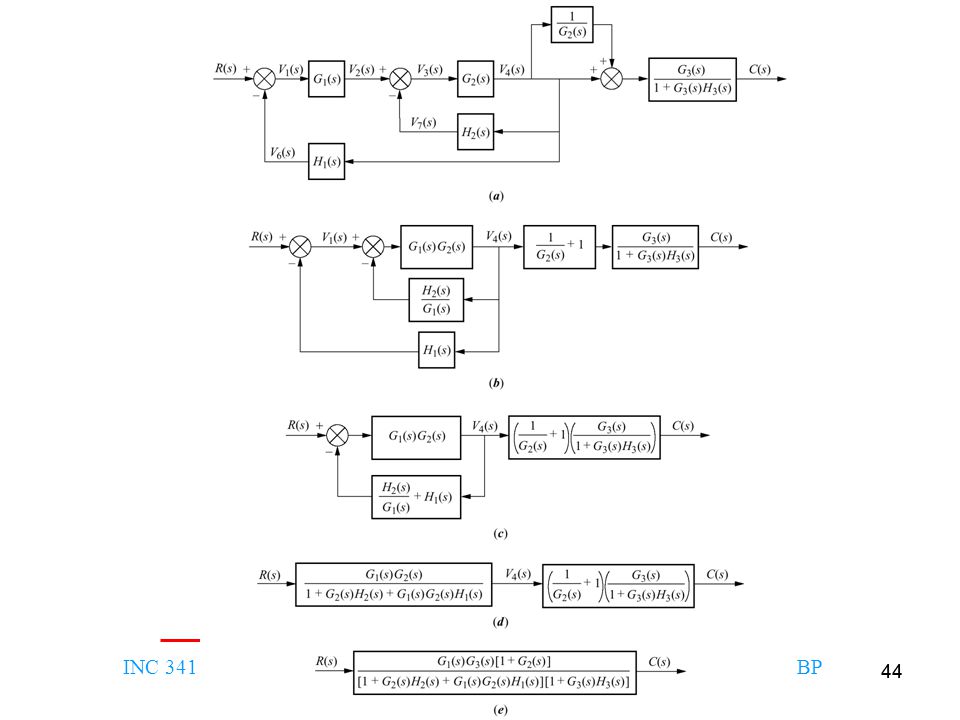
Example ให้ลดรูปจนเหลือ block เดียว















 98.08% 100.02% จังหวัด.>")





 ครูวิชาการสาขาเคมี โรงเรียนมหิดลวิทยานุสรณ์>")
