PIC Code Execution II
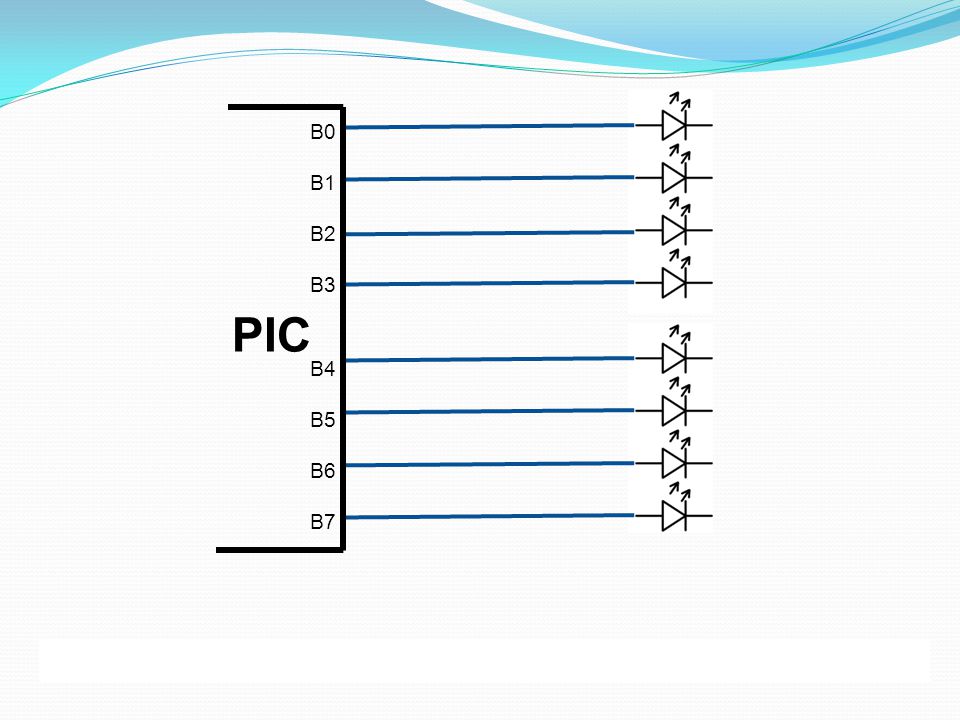
PIC B0 B1 B2 B3 B4 B5 B6 B7
Memory Mapped I/O (MMIO) BSF06.0 BCF06.0 BSF = Bit Set File, BCF = Bit Clear File
ข้อดีข้อเสียของ Memory Mapped I/O ไม่ต้องออกแบบคำสั่งเฉพาะสำหรับ I/O MOVWF 06 MOVWF 21 I/O Operation Mem Operation
ข้อดีข้อเสียของ Memory Mapped I/O Memory Mapped I/O ใช้คำสั่งชุดเดียวในการเข้าถึง Memory และอุปกรณ์รอบข้าง ช่วยลดความซับซ้อนของ CPU ทำให้ราคาถูกลง และ ใช้ งานได้ง่าย Memory MappedPort-Mapped With some exceptions
ข้อดีข้อเสียของ Memory Mapped I/O แต่ก็ต้องเสียตำแหน่งใน Memory ไปบางส่วน เช่น PIC16F886 จะเสียพื้นที่ไป 128 Byte จากทั้งหมด 368 Bytes (~35%) เพื่อใช้ทำ Memory Mapped I/O 128 Bytes I/O Mapped 240 Bytes Available RAM
3.x GB?? 4 GB The 3 Gig RAM Problem 32 bit OS InstalledUsable ระบบ 32 บิตควรใช้งาน RAM ได้ 2^32 = 4GB พอดี แต่ ทำไมในความเป็นจริง กลับใช้ได้แค่ 3.x GB
The 3 Gig RAM Problem ~1 GB 3 GB Address Space Video Card BIOS PCI Bus Etc. RAM (4 GB) ที่อยู่ของหน่วยความจำส่วนบนถูกเอาไปใช้สำหรับ I/O
ข้อดีข้อเสียของ Memory Mapped I/O ถ้า Memory และ I/O ใช้ data bus เดียวกัน อาจทำให้ Memory Access ช้าลง เนื่องจากต้องรอคำสั่ง I/O ที่ทำงานช้ากว่า MOVWF 06 MOVWF 21 Slow I/O Operation Fast Mem Operation
Port Mapped I/O (PMIO) ใช้คำสั่งแยกกันระหว่าง Memory Operation กับ Peripheral Operation ปัจจุบัน CPU ที่ใช้ Port Mapped I/O มักใช้ Memory Mapped I/O ควบคู่กันไปด้วย
ข้อดี / เสียของ Port Mapped I/O การใช้คำสั่งเฉพาะทางทำให้ประสิทธิภาพ โดยรวมดีกว่า แต่ CPU จะมีความซับซ้อนที่สูงขึ้นจากคำสั่งที่ เพิ่มขึ้นมาเหล่านี้ การใช้งานยากขึ้นสำหรับผู้พัฒนา PIC 16FIntel x86 35 Instructions1,000+ Instructions* * See
Memory Mapped I/O Case Study PIC 16F, Tri-state I/O, Memory Organization
Look at the complete ASM code for output_high(PIN_B0) output_high(PIN_B0); 00ED: BSF EE: BCF EF: BCF F0: BSF 06.0 Q: Why do we need these commands? A: Before using a PIN on the PIC, we need to configure it’s direction
Each MCU PIN can be in 3 states (Tri-State) StateDescription HighThe pin sources 5V LowThe pin sinks to GND High ImpedanceThe pin is an input Output Mode Input Mode
Tri-state PIN configuration Telling the MCU which mode we want to use an IO pin 0 = Output 1 = Input
output_high(PIN_B0); 00EE: BCF > Clear bit 0 of TRISB 00F0: BSF > Set bit 0 of PORTB output_high(PIN_B0); 00ED: BSF EE: BCF EF: BCF F0: BSF 06.0 So, the code should be like this … But why is it like this?
The problem with “BCF 86.0” 0x86 = The space for the file register address is limited to 7 bits
Status Register (Address 03) See section “Register 5-1” in the handout for details of the Status Register Bit 6,7 ใช้เลือก Register Bank 00 = Bank 0 01 = Bank 1 10 = Bank 2 11 = Bank 3
Bank 0 Bank 1Bank 2 Bank 3
แบบฝึกหัด – ทำไฟวิ่งบน PIC Simulator IDE ; set PORTB as output bsf status,5 bcf status,6 movlw 0 movwf trisb ; disable Analog inputs bsf status,6 movwf 0x9 ; switch to FSR Bank 0 bcf status,5 bcf status,6 bsf portb,0 ; trun on LED on B0 กำหนดโปรแกรมส่วนต้นให้เพื่อ setup ระบบดังนี้
The RLF command Rotates the bits in a file register through the carry bit RLF Example: MOVLW1 MOVWF0x6 ; RAM value = RLF 0x6,F ; value is now
Status Register (Address 03) Carry Bit = จะรับบิตที่เกินออก มาทางซ้ายของ W register See section “Register 5-1” in the handout for details of the Status Register
PIC-C Trick: RAM access #byte b_port = 6 // mem pointer #bit B0 = b_port.0 b_port = 0xff; // drive port b B0 = 1; // set bit B0 to 1
Methods Write Machine Code Manually Write Assembly Code Use a High-Level Compiler
Writing Machine Code ENIAC
Benefits of High-Level Compilers Poor optimization Non-Optimal Hardware Utilization Drawbacks of High-Level Compilers Simple for the programmer Reduce development time Allows for the development of larger programs Easier to port to different hardware systems
Poor Optimazation while (1) output_b(i); Loop: BSF 03.5 CLRF 06 BCF 03.5 MOVF 21,W MOVWF 06 GOTO Loop No need to set TRIS bits every time
Poor Optimization Ex int i; i = 5; 000D: MOVLW E: BCF F: MOVWF do { i--; 0010: DECF 21,F } while (i>0); 0011: MOVF 21,F 0012: BTFSS : GOTO 010 DECF already sets the Z bit
Non-Optimal HW Utilization Blinking LED example Our code from exercise BSF06.0 Loop: RLF06 GoTo Loop Code generated by PIC-C Loop: BCF 03.5 MOVF 0x21,W MOVWF 06 RLF 0x21, F GOTO Loop