ดาวน์โหลดงานนำเสนอ
1
Low-speed UAV Flight Control System
COE Low-speed UAV Flight Control System นาย ชลณุพงษ์ ศิริตัน รหัส นาย นิติกร สาระรัตน์ รหัส อาจารย์ที่ปรึกษา : อ.วาธิส ลีลาภัทร อาจารย์ผู้ร่วมประเมิน : อ.นวภัค เอื้ออนันต์ อ.ชัชชัย คุณบัว 1

2
Out Line - ที่มาและความสำคัญ - วัตถุประสงค์ - ขอบเขต - แผนการดำเนินงาน - ทฤษฎีที่เกี่ยวข้อง - การออกแบบและพัฒนา - ปัญหาและอุปสรรค - สรุป 1

3
ที่มาและความสำคัญ อากาศยานไร้คนบังคับ (UAV: Unmanned aerial vehicle) เป็นที่ต้องการทั้งในกิจการของทหารและพลเรือนเพื่อสนับสนุนภารกิจ ลาดตระเวน สอดแนม ถ่ายภาพ หรือทำหน้าที่เป็นจุดทวนสัญญาณชั่วคราวในระบบสื่อสาร ซึ่งจำเป็นต้องเคลื่อนที่ได้เองไปยังพิกัดและความสูงตามที่โปรแกรมไว้ 2
 เป็นที่ต้องการทั้งในกิจการของทหารและพลเรือนเพื่อสนับสนุนภารกิจ ลาดตระเวน สอดแนม ถ่ายภาพ หรือทำหน้าที่เป็นจุดทวนสัญญาณชั่วคราวในระบบสื่อสาร ซึ่งจำเป็นต้องเคลื่อนที่ได้เองไปยังพิกัดและความสูงตามที่โปรแกรมไว้ 2.")
4
วัตถุประสงค์ 1.ออกแบบและสร้างระบบควบคุมอากาศยานไร้คนบังคับโดยใช้ high-performance microcontroller เพื่ออ่านข้อมูลจาก GPS และair pressure sensor เพื่อนำมาเปรียบเทียบกับแผนการบินที่วางไว้ 2. ทดสอบการควบคุมอากาศยานไร้คนบังคับโดยจำลองกับระบบทดสอบที่สร้างขึ้นบน PC 3

5
ขอบเขต 4

6
แผนการดำเนินงาน 5

7
GPS (Global Positioning System )
ระบบที่ใช้ในการระบุตำแหน่งบนพื้นโลก โดยอาศัยสัญญาณจากกลุ่มดาวเทียม 24 ดวง ที่โคจรอยู่รอบโลก ซึ่งจะอ้างอิงกับระบบเส้นรุ้ง เส้นแวง ในการระบุตำแหน่ง 7

8
ส่วนประกอบของระบบ GPS
1. ส่วนอวกาศ 2. สถานีควบคุม 3. ผู้ใช้ 8

9
ตัวรับสัญญาณ GPS อุปกรณ์รับสัญญาณจากดาวเทียม พอร์ต RS-232
เสารับสัญญาณ แบตเตอรี่ และอุปกรณ์เสริมอื่นๆ 9

10
NMEA ( National Marine Electronics Association )
NMEA เป็นมาตรฐานในการสื่อสารข้อมูลระหว่างอุปกรณ์ โดยใช้รหัสอักษร ASCII และการสื่อสารข้อมูลแบบอนุกรมในการส่งข้อมูล จาก “Talker” ตัวหนึ่ง ไปยัง “Listeners” หนึ่งหรือหลายตัว อัตราการส่งข้อมูลอยู่ที่ 4800 บิต/วินาที ข้อมูลที่ส่งมีลักษณะเป็น“Sentence” 10

11
ตัวอย่าง $GPRMC,123519,A, ,N, ,E,022.4,084.4,230394,003.1,W*6A Where: RMC Recommended Minimum sentence C Fix taken at 12:35:19 UTC A Status A=active or V=Void ,N Latitude 48 deg ' N ,E Longitude 11 deg ' E 022.4 Speed over the ground in knots 084.4 Track angle in degrees True Date - 23rd of March ,W Magnetic Variation *6A The checksum data, always begins with * 11

12
โปรแกรมแปลความหมายข้อมูล GPS
12

13
ผลลัพธ์ของโปรแกรม 13

14
Flowchart Diagram Start รับข้อมูล GPS เปรียบเทียบ Sentence แปลข้อมูล
แสดงผล 14

15
ปัญหาและอุปสรรค การรับข้อมูลผ่านพอร์ต RS ความชำนาญในการเขียนโปรแกรม 15

16
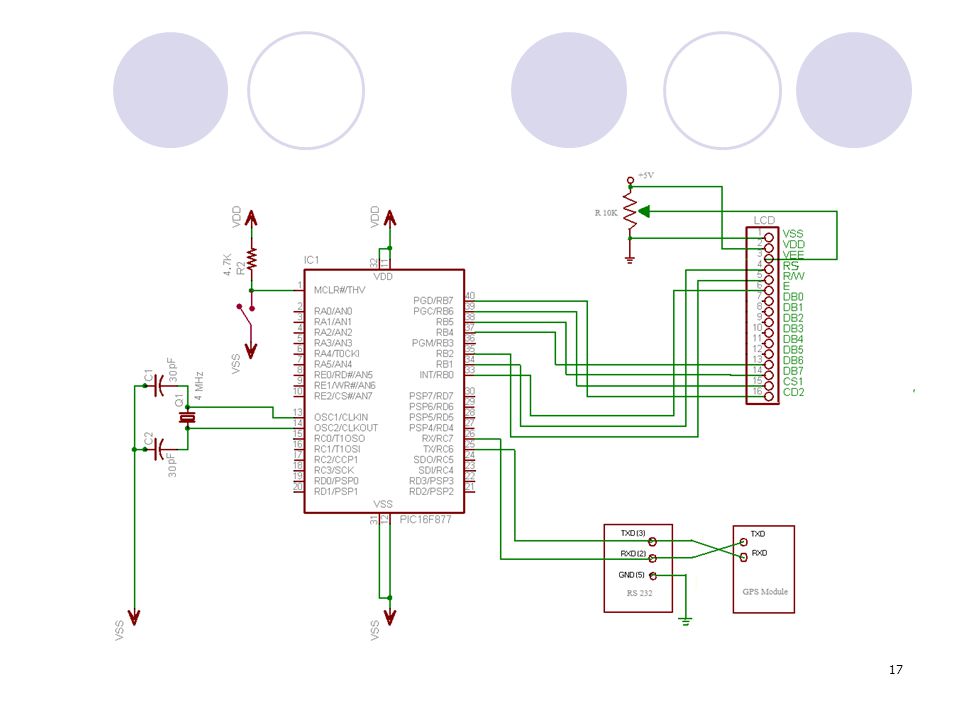
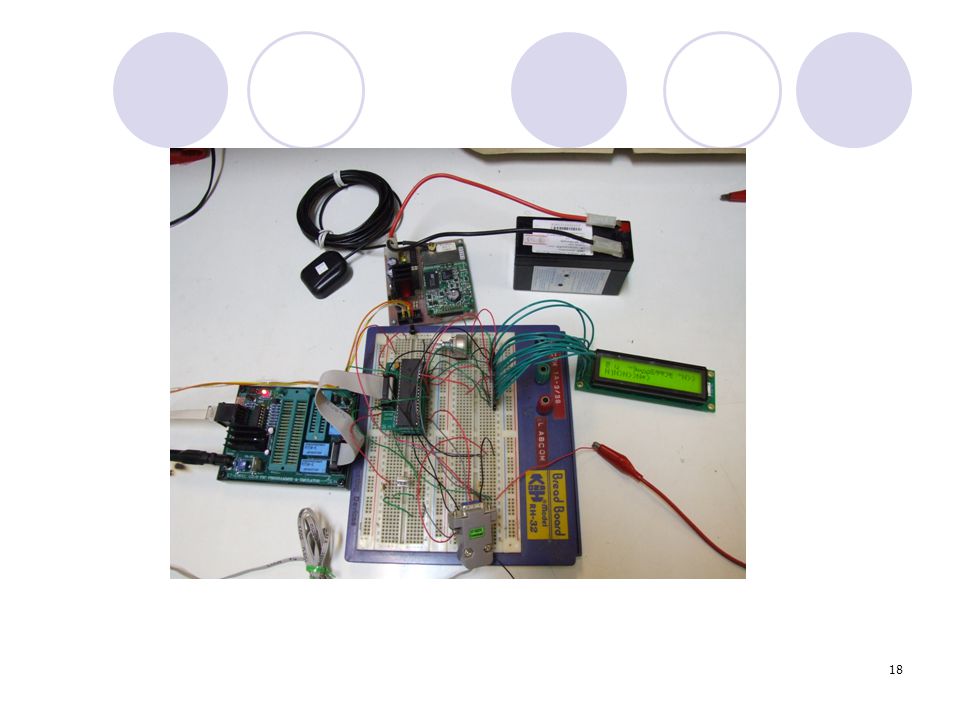
โครงสร้างระบบ PC LCD Microcontroller GPS Module

19
สรุป

20
Questions?










>")










