ดาวน์โหลดงานนำเสนอ
งานนำเสนอกำลังจะดาวน์โหลด โปรดรอ

1
Network Function Piyadanai Pachanapan

2
พิจารณา Zero – State Response ของวงจรข่ายแบบเชิงเส้นไม่ขึ้นกับเวลา
(Linear Time Invariant Networks) พิจารณาคุณสมบัติของ Network Functions และ ความสัมพันธ์กับ Sinusoidal Steady State Response และ Impulse Response ศึกษาเรื่อง Poles และ Zeros ของ Network Function และ ผลตอบสนองเชิง ความถี่ของวงจรข่าย (Network’s Frequency Response)
 พิจารณาคุณสมบัติของ Network Functions และ ความสัมพันธ์กับ. Sinusoidal Steady State Response และ Impulse Response. ศึกษาเรื่อง Poles และ Zeros ของ Network Function และ ผลตอบสนองเชิง. ความถี่ของวงจรข่าย (Network’s Frequency Response)")
3
คำจำกัดความ (Definition)
Network Funtion H(s) คือ Network Funtion เป็นฟังก์ชันของ Complex Variable [S] และมีความสัมพันธ์ ระหว่าง Zero-State Response กับ Input ถ้าให้ a(.) คือ input b(.) คือ Zero – State Response เมื่อ s คือ Complex Frequency จะได้
 คือ. Network Funtion เป็นฟังก์ชันของ Complex Variable [S] และมีความสัมพันธ์ ระหว่าง Zero-State Response กับ Input. ถ้าให้ a(.) คือ input b(.) คือ Zero – State Response เมื่อ s คือ Complex Frequency. จะได้")
4
EXAMPLE # 1 จงหา Network Function ของวงจร RC ซึ่งมีแหล่งจ่ายเป็น Independent Current Source และมีแรงดัน v เป็น Zero – State Response จาก KCL : แต่ vC = v

5
เนื่องจาก v เป็น Zero State Response initial condition เป็นศูนย์
แปลงลาปลาซได้เป็น หา Network Function ได้เป็น

6
EXAMPLE # 2 จงหา Network Function จากวงจร Low Pass Filter ในรูป โดยกำหนดให้ input เป็น Voltage Source [e0] และกระแส i2 เป็น Zero State Response ของความต้านทานในวงจร

7
Loop 1 : Loop 2 : แต่เนื่องจากวงจรเป็น Zero State ที่ t = 0- initial condition = 0 Loop 1 : ( 1 ) ( 2 ) Loop 2 :
 Loop 2 :")
8
แปลงลาปลาซสมการ (1), (2) เขียนในรูปเมตริกซ์ได้เป็น
, (2) เขียนในรูปเมตริกซ์ได้เป็น")
9
หา I2 โดยวิธี Cofactor Method
จาก det ของ Yn(s) ที่ตัดแถว i และหลัก j ออกไปแล้ว
 ที่ตัดแถว i และหลัก j ออกไปแล้ว.")
10
หา Network Function ได้เป็น

11
คุณสมบัติทั่วไป (General Properties)
Network Function เป็นฟังก์ชันของ Complex Frequency [s] กับค่าสัมประสิทธิ์ที่เป็นค่าจริง (Real Coefficients) เมื่อ K คือ Scale Factor zi คือ Zero (ศูนย์) ของ Network Function [มีค่า i = 1,2,…,m] pj คือ Pole (ขั้ว) ของ Network Function [มีค่า j = 1,2,…,n]
 เมื่อ K คือ Scale Factor. zi คือ Zero (ศูนย์) ของ Network Function [มีค่า i = 1,2,…,m] pj คือ Pole (ขั้ว) ของ Network Function [มีค่า j = 1,2,…,n]")
12
Poles, Zeros and Frequency Response
แทนตัวแปร S ด้วย ใน Network Function H(s) จะได้ ส่วนใหญ่เป็น Complex Number และสามารถเขียนในรูป Polar Form ได้เป็น คือ ขนาด (Magnitude) ของ Network Function คือ เฟส (Phase) ของ Network Function ที่ความถี่
 จะได้ ส่วนใหญ่เป็น Complex Number และสามารถเขียนในรูป Polar Form ได้เป็น. คือ ขนาด (Magnitude) ของ Network Function. คือ เฟส (Phase) ของ Network Function ที่ความถี่")
13
เขียน ในรูป ล็อกการิทึม (Logarithmic) ฐาน e ได้เป็น
ส่วนจริงคือกำลังขยาย (Gain) และ กำหนดค่า Gain ด้วย nepers หรือ Decibels [db]
 และ กำหนดค่า Gain ด้วย. nepers. หรือ. Decibels [db]")
14
จาก Network Function พบว่า :
ขนาดและเฟสของ Network Function สามารถนำมาใช้หา Zero – State Response ที่เกิดจาก input แบบต่างๆได้ ข้อมูลของขนาดและเฟสของ Network Function ที่ทุกๆค่า คือ Frequency Response ของวงจร Zeros และ Poles ของ Network Function จะส่งผลต่อ Frequency Response

15
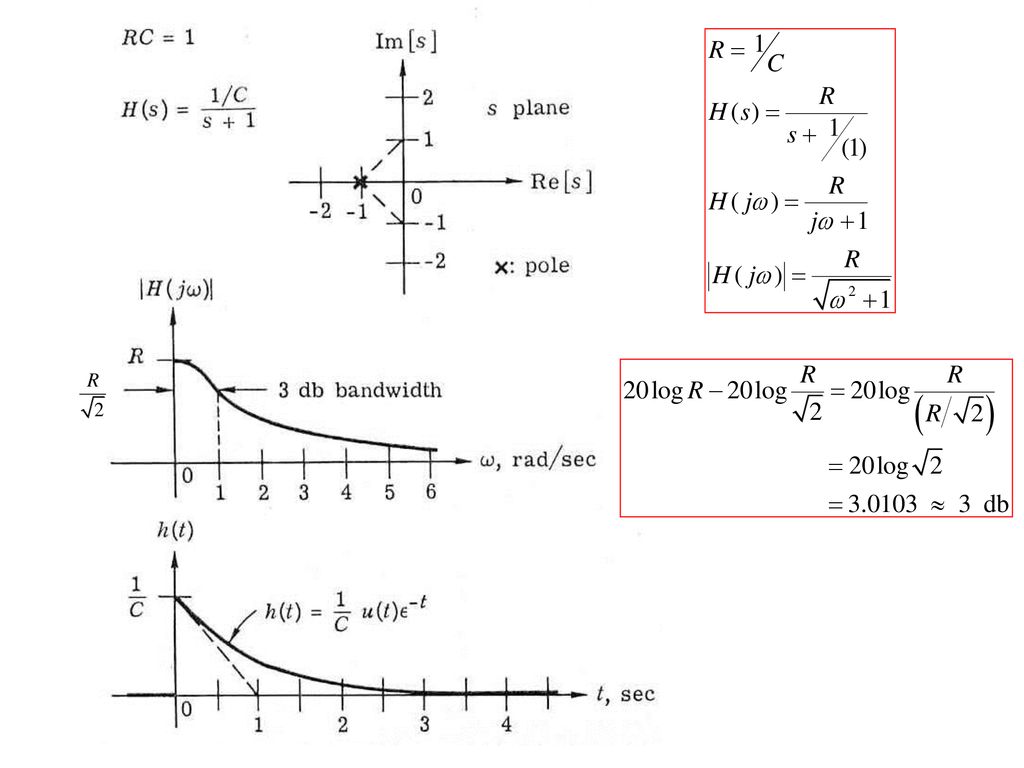
EXAMPLE # 3 จาก EXAMPLE # 1 วงจร RC มี Network Function เป็น
- H(s) ไม่มีค่าศูนย์ (Zeros) และมีขั้ว (Poles) ที่ สามารถหา Magnitude และ Phase โดยแทน
 ไม่มีค่าศูนย์ (Zeros) และมีขั้ว (Poles) ที่ สามารถหา Magnitude และ Phase โดยแทน.")
16
จาก Magnitude Phase

18
นำ Poles และ Zeros ไปพล็อต

19
= length of vector = angle of the vector จะได้ และ ถ้า เปลี่ยน เปลี่ยน ขนาด และ เฟส เปลี่ยน

20
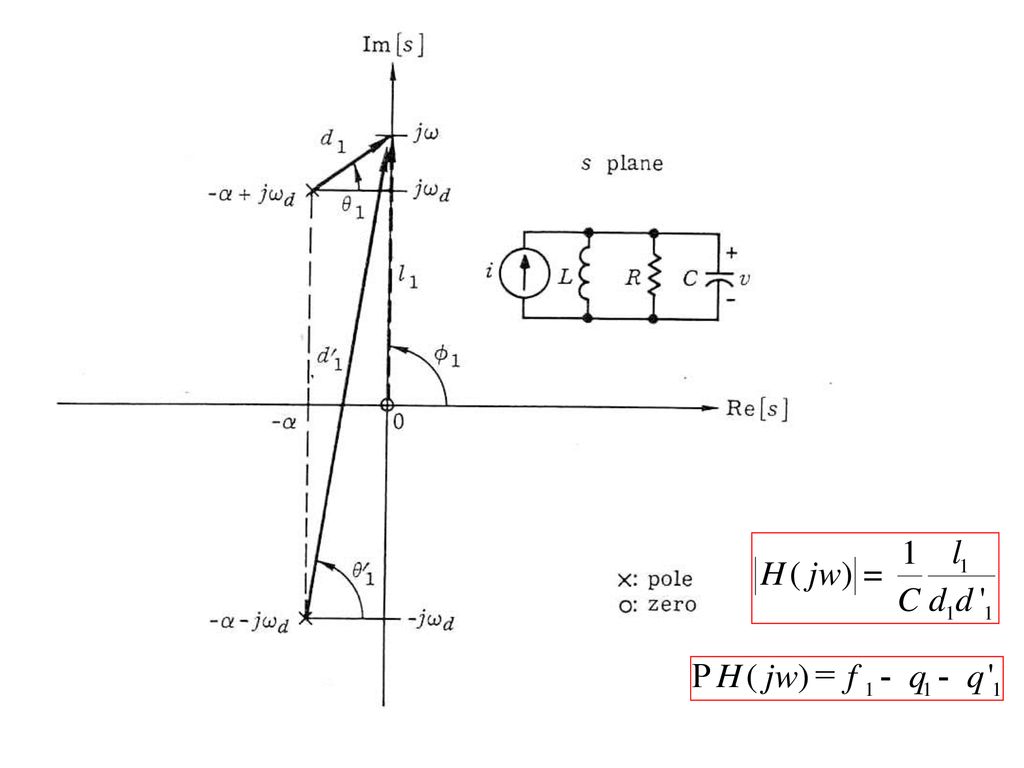
EXAMPLE # 4 พิจารณาวงจร RLC แบบขนาน มีแหล่งจ่ายเป็น Current Source และกำหนดให้ v เป็น Zero-State Response KCL : initial condition = 0 และ v = vC = vL = vR

21
แปลงลาปลาซได้เป็น :

22
กำหนดให้ และ และ รากของส่วน จาก ความเป็นไปได้ของราก มี 4 แบบ คือ 1. 2.
ความเป็นไปได้ของราก มี 4 แบบ คือ 1. 2. 3. 4.

23
กรณี 3 จาก เมื่อ จาก มี Zero ที่ s = และ มี Poles ที่ s =

24
แทน S ด้วย ได้ Network Function เป็น
Magnitude Phase

26
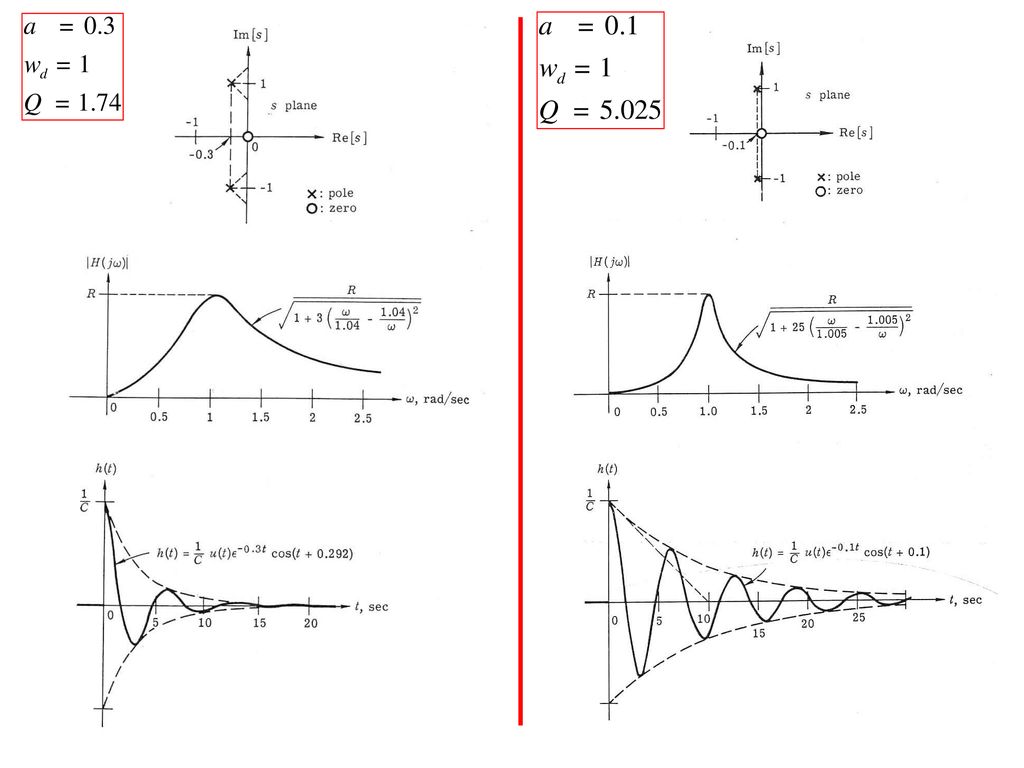
ลักษณะกราฟของ Magnitude และ Phase
1. ที่ 2. ที่ และ เพราะว่ามุม จะหักล้างกัน 3. จะเพิ่มขึ้นเรื่อยๆ เมื่อ เพิ่ม และจะมีค่าสูงสุดที่ เพราะว่าที่จุดนี้ ขนาด d1 จะน้อยที่สุด 4. ถ้า ส่งผลให้ เมื่อ

27
5. เพราะว่า 6. เมื่อเพิ่มค่า เกินจุด ส่งผลให้ : มีค่าลงลด ที่ ที่ เพราะว่าเมื่อ ขึ้นกับค่า รูปร่างของเส้นโค้งจะขึ้นกับ ซึ่งหมายความว่าขึ้นกับ Q (tuned circuit)
")
28
Q มาก Q น้อย

29
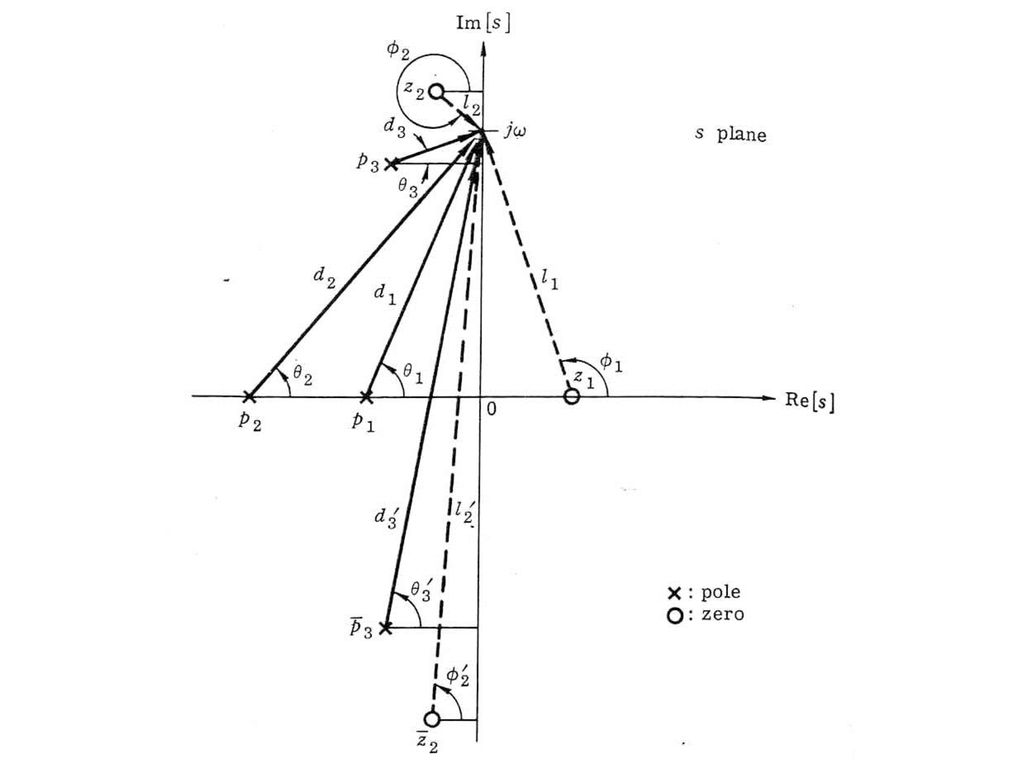
EXAMPLE # 5 จากวงจร Transistor Amplifier ในรูป มี Network Function เป็น มี Zero เป็น มี 2 Poles คือ

30
จะได้ Magnitude และ Phase เป็น

31
20 log 20 = 26 db 3 db Cut-Off Frequency

32
General Case จาก สามารถหา Frequency Response ตามขั้นตอนดังนี้
Step 1 : หา Poles และ Zeros Step 2 : เปลี่ยนจากโพลิโนเมียล เป็นส่วนประกอบอันดับ 1 (1 st Order Factors) คือ Scale Factor
 คือ Scale Factor.")
33
Step 3 : แทน s ด้วย และทำเป็นค่าสมบูรณ์เพื่อหาค่า Gain
หรือ ใส่ค่า ln ทั้งสองข้างสมการ (Nepers or Decibels)
")
34
Step 4 : หาค่ามุมทั้งสองข้างสมการ
เมื่อ pole ใกล้กับแกน , Magnitude จะขนาดมากสุด(Maximum) เมื่อ zero ใกล้กับแกน , Magnitude จะขนาดน้อยสุด (Minimum)
 เมื่อ zero ใกล้กับแกน , Magnitude จะขนาดน้อยสุด (Minimum)")
36
Poles, Zeros and Impulse Response
Impulse Response คือ Zero – State Responseที่เกิดจากอินพุต (สัญญาณกระตุ้น) เป็นสัญญาณ Impulse เนื่องจากลาปลาซของสัญญาณ impulse = ทำให้ ศึกษาความสัมพันธ์ของ Poles และ Zeros ต่อพฤติกรรมของ Impulse Response Network Function = Impulse Response
 เป็นสัญญาณ Impulse. เนื่องจากลาปลาซของสัญญาณ impulse = 1 ทำให้ ศึกษาความสัมพันธ์ของ Poles และ Zeros ต่อพฤติกรรมของ Impulse. Response. Network Function = Impulse Response.")
37
จากวงจร RC Time Domain หมายเหตุ เป็นฟังก์ชัน unit step เนื่องจาก initial condition (t=0-) เป็น 0
 เป็น 0")
41
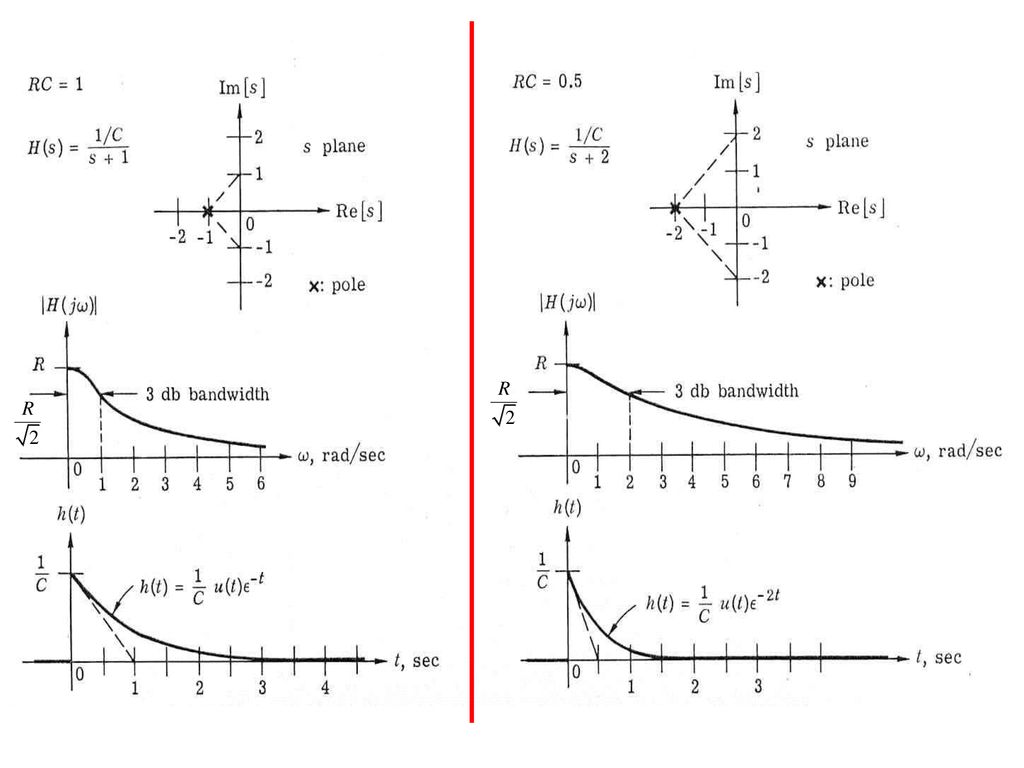
จากกรณี RC = 1 และ กรณี RC = 0.5 สรุปได้ว่า
กรณีที่ ค่า Pole อยู่ใกล้แกน มากกว่า จะทำให้ความกว้างของ 3 – db Bandwidth แคบกว่า อีกกรณีหนึ่ง กรณีที่ ค่า Pole อยู่ไกลแกน มากกว่า จะทำให้ Impulse Response มีค่าลดลงสู่ค่าศูนย์ เร็วกว่า อีกกรณีหนึ่ง

42
กรณีวงจร RLC กรณี เมื่อ

43
ขนาด

44
จาก

46
หมายเหตุ เป็นฟังก์ชัน unit step เนื่องจาก initial condition = 0
เมื่อ

48
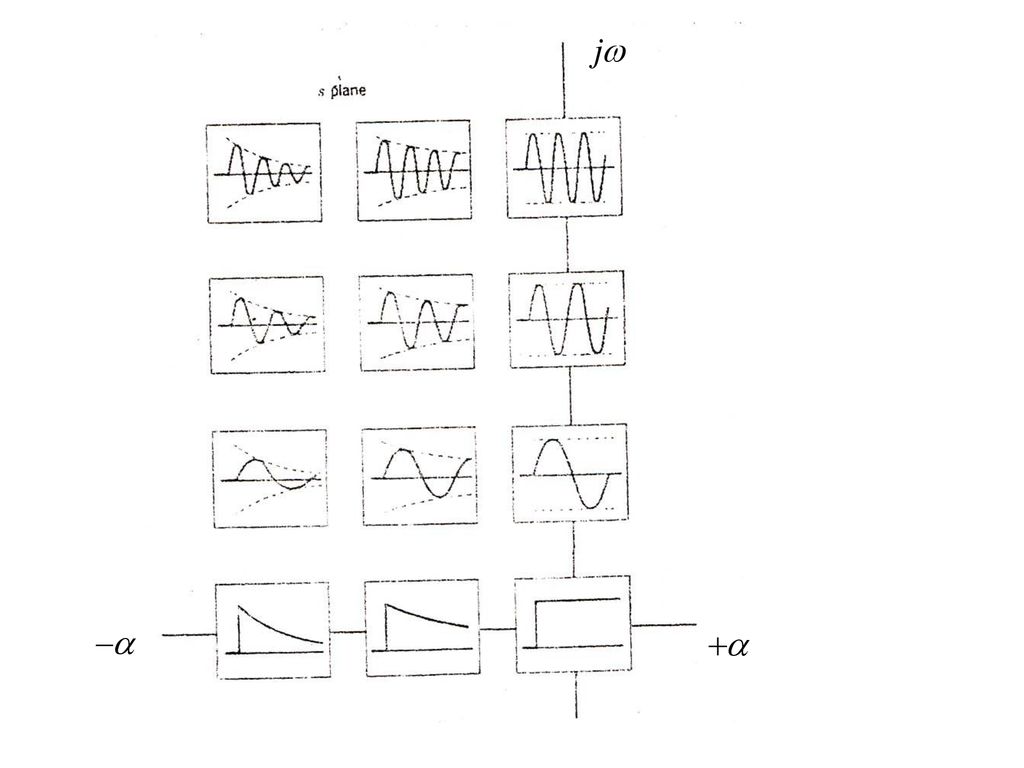
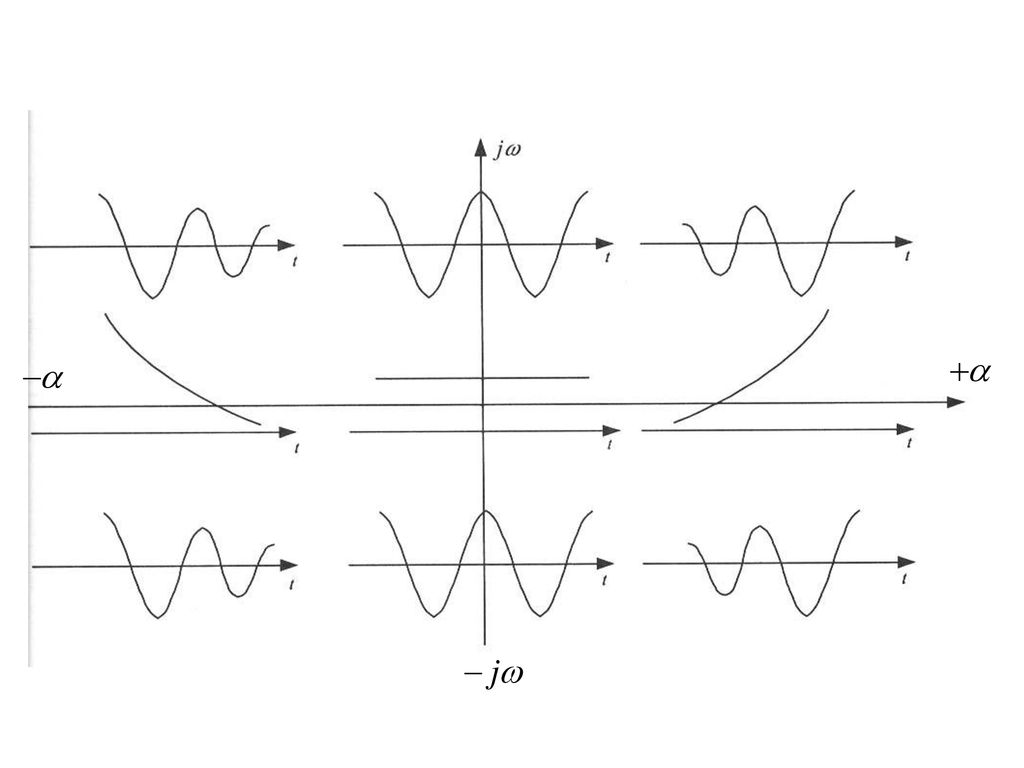
จากผลที่ได้ทั้งสองกรณี พบว่า :
1) ระยะทางระหว่าง pole กับ แกน จะส่งผลต่ออัตราการลดลงของผลตอบสนองอิมพัลส์ (impulse response) กรณีที่ pole ใกล้แกน มากกว่า จะส่งผลให้มีอัตราการลดลงน้อยกว่า กรณี pole อยู่บนแกน ส่งผลให้ไม่เกิดการลดลง (no decay) กรณี pole อยู่ด้านขวาของแกน ส่งผลให้ impulse response เพิ่มขึ้นแบบ exponential
 ระยะทางระหว่าง pole กับ แกน จะส่งผลต่ออัตราการลดลงของผลตอบสนองอิมพัลส์ (impulse response) กรณีที่ pole ใกล้แกน มากกว่า จะส่งผลให้มีอัตราการลดลงน้อยกว่า. กรณี pole อยู่บนแกน ส่งผลให้ไม่เกิดการลดลง (no decay) กรณี pole อยู่ด้านขวาของแกน ส่งผลให้ impulse response เพิ่มขึ้นแบบ exponential.")
49
2) ค่า (Ordinate of pole) จะผลต่อ ความถี่ของ impulse response
มาจาก หรือ ระยะห่างจุดตัด y=0 (zero-crossing) ของ impulse response ค่า มาก ความถี่ของ impulse response สูง 3) กรณีที่ pole ใกล้แกน มากกว่า กราฟ magnitude จะมีลักษณะแหลม ไปที่ค่าสูงสุดกว่า
 ของ impulse response. ค่า มาก ความถี่ของ impulse response สูง. 3) กรณีที่ pole ใกล้แกน มากกว่า กราฟ magnitude จะมีลักษณะแหลม ไปที่ค่าสูงสุดกว่า.")
52
Driving Point Function
ไดรวิ่งพอยต์ฟังก์ชัน คือ : อัตราส่วนระหว่างกระแสต่อแรงดันในเทอมของ S หรือ อัตราส่วนระหว่างแรงดันต่อกระแสในเทอมของ S ที่ ด้านทางเข้าและด้านทางออกใดๆ

53
ประเภทของไดรวิ่งพอยต์ฟังชั่น
1. ไดรวิ่งพอยต์อิมพีแดนซ์ฟังก์ชัน (Driving Point Impedance Function) คือ “อัตราส่วนระหว่างแรงดันต่อกระแสในเทอมของ S” 2. ไดรวิ่งพอยต์แอดมิตแตนซ์ฟังก์ชัน (Driving Point Admittance Function) คือ “อัตราส่วนระหว่างกระแสต่อแรงดันในเทอมของ S”
 คือ อัตราส่วนระหว่างแรงดันต่อกระแสในเทอมของ S 2. ไดรวิ่งพอยต์แอดมิตแตนซ์ฟังก์ชัน (Driving Point Admittance Function) คือ อัตราส่วนระหว่างกระแสต่อแรงดันในเทอมของ S")
54
The Driving Point Impedance of R, L, C element

55
Example จากวงจรในรูป จงเขียน Driving Point Impedance และ Driving Point Admittance KVL : กำหนด Initial condition = 0 แปลงลาปลาซเป็น

56
จะได้ Driving point impedance Z(s) ด้านทางเข้า คือ
 ด้านทางเข้า คือ")
57
จะได้ Driving point Admittance Y(s) ด้านทางเข้า คือ
 ด้านทางเข้า คือ")
58
Example จากวงจรในรูป จงเขียน Driving Point Impedance และ Driving Point Admittance KCL : (1)
")
59
หา i1(t) : จะได้ หา i2(t) :
 : จะได้ หา i2(t) :")
60
แทนค่า I1(s) และ I2(s) ใน (1) จะได้ :
 และ I2(s) ใน (1) จะได้ :")
61
จาก ได้ Driving Point Impedance Z(s) :
 :")
62
ได้ Driving Point Admittance Y(s) :
 :")
งานนำเสนอที่คล้ายกัน




>")

















>")