ดาวน์โหลดงานนำเสนอ
1
โครงสร้างของหุ่นยนต์เดินตาม เส้น

2
Sensor และหลักการ ทำงาน เซนเซอร์บนตัว หุ่นยนต์ รูปเซนเซอร์ขยายวงจรเซนเซอร์

3
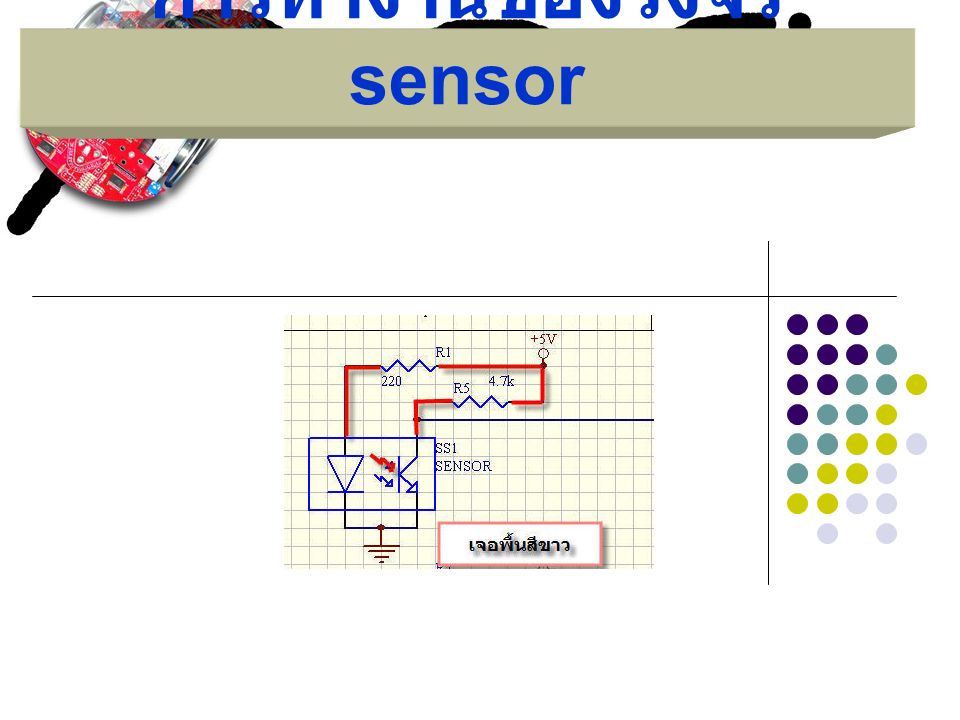
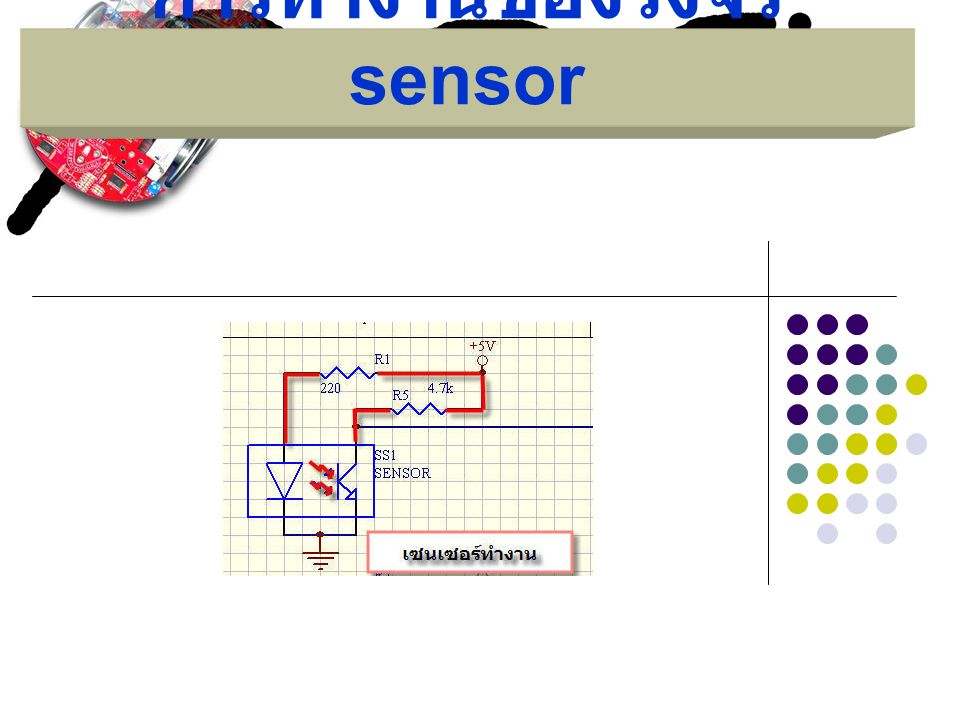
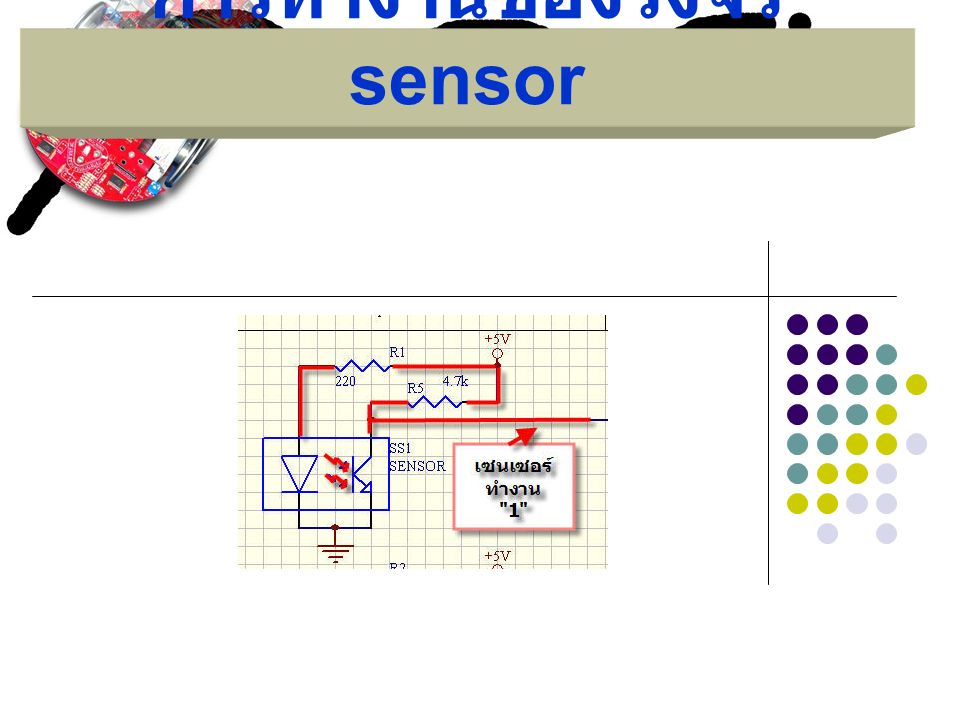
การทำงานของวงจร sensor รูปวงจร sensor

4
การทำงานของวงจร sensor

8
Sensor และหลักการ ทำงาน

9
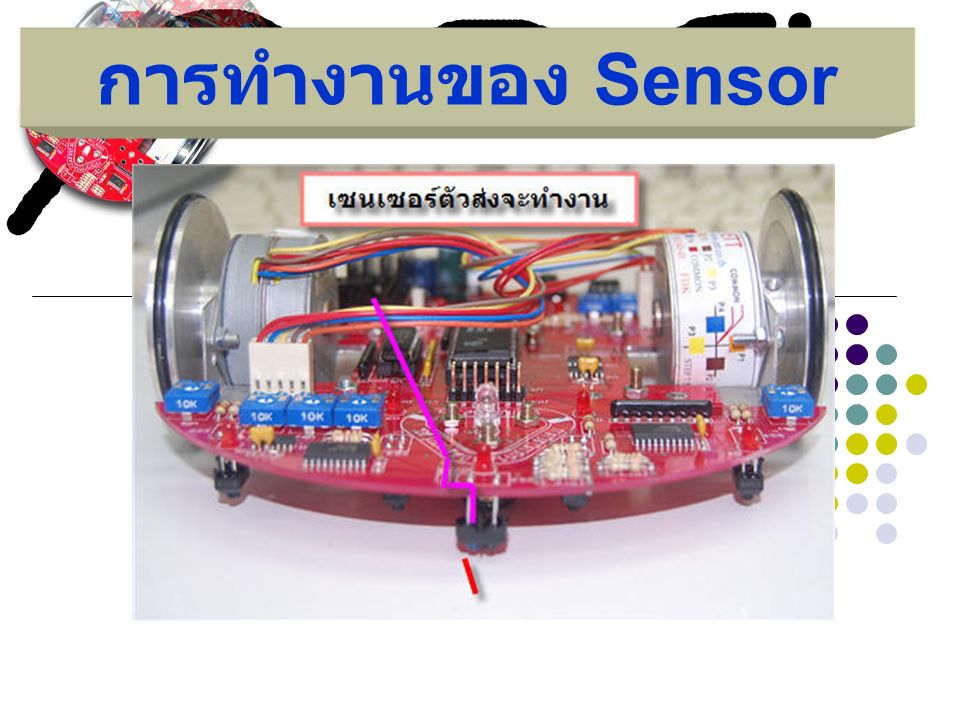
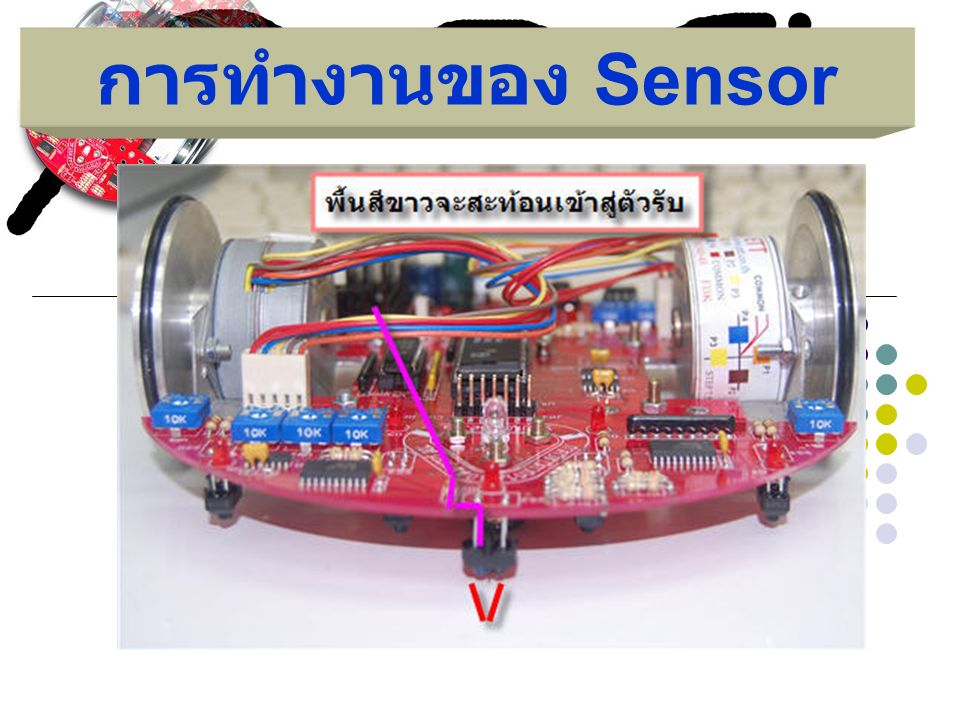
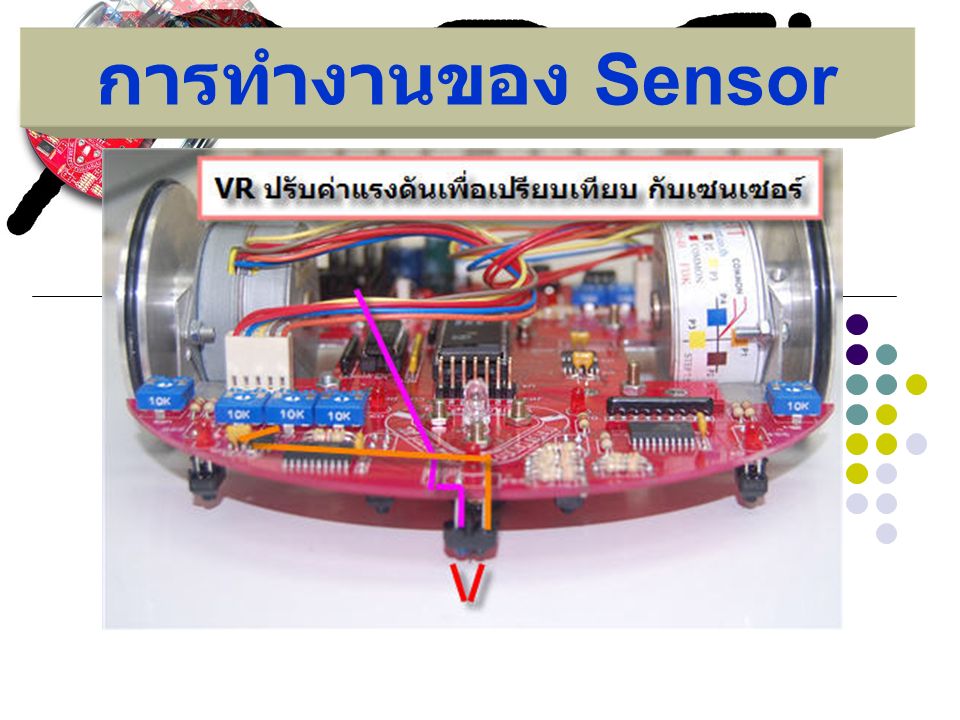
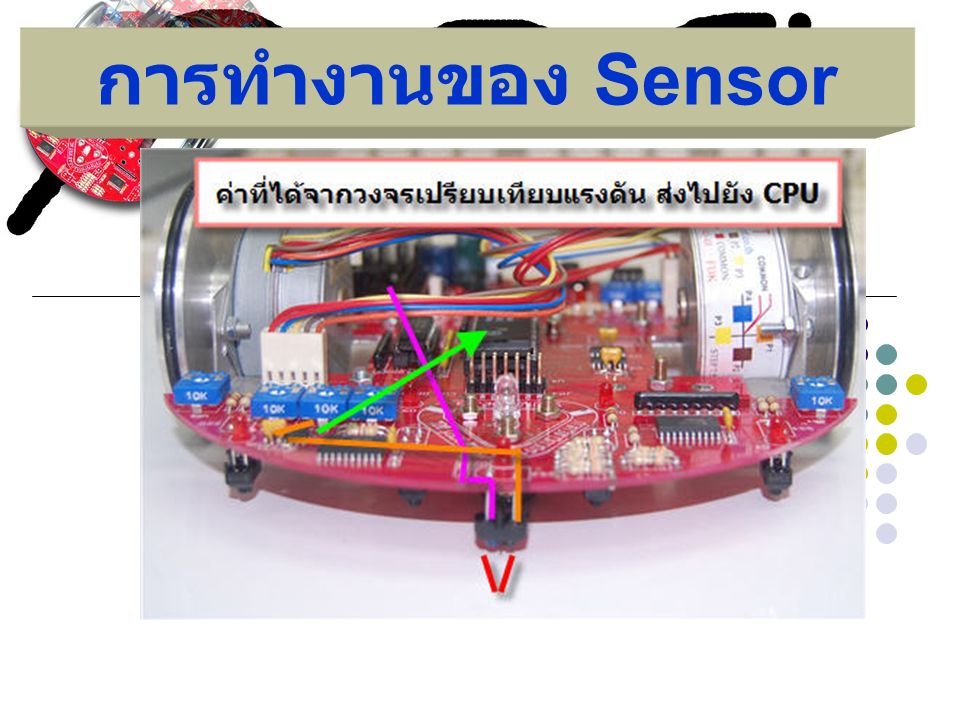
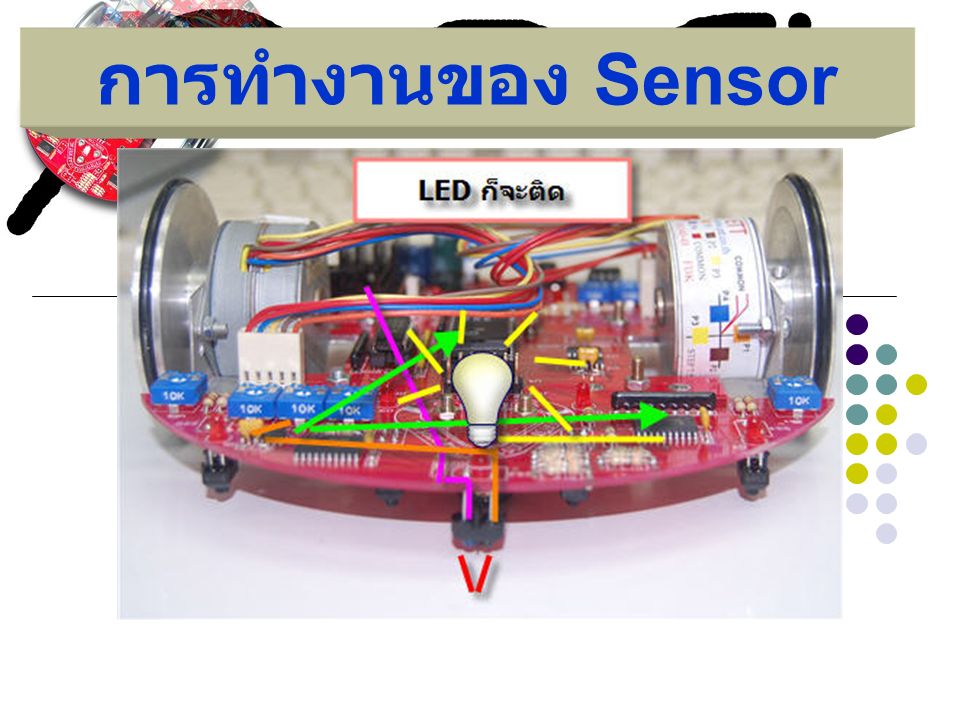
การทำงานของ Sensor

18
Sensor และหลักการ ทำงาน

19
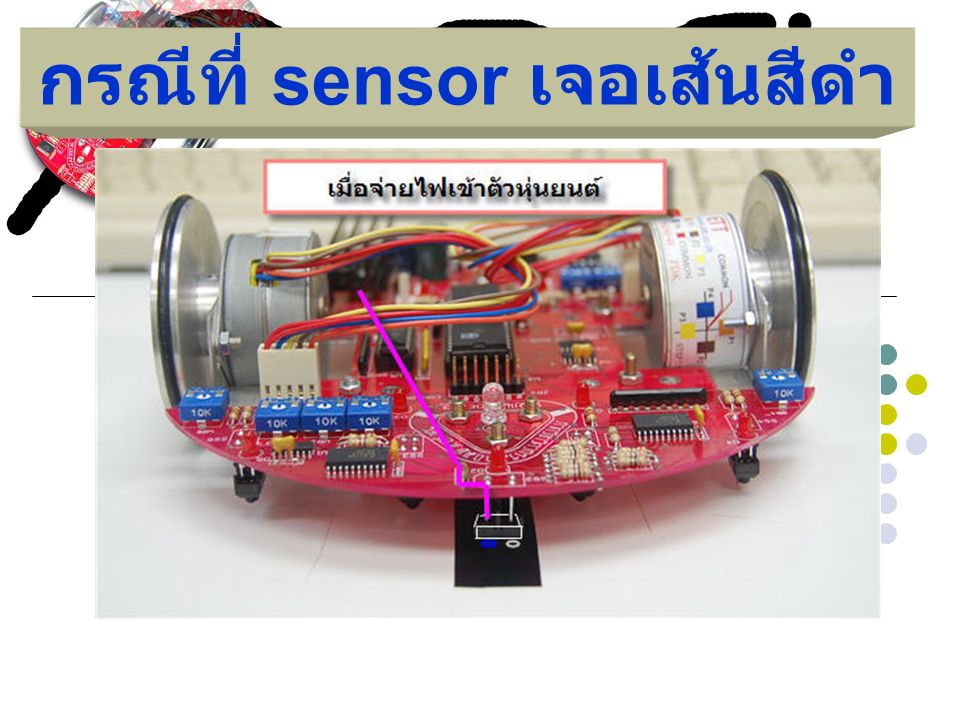
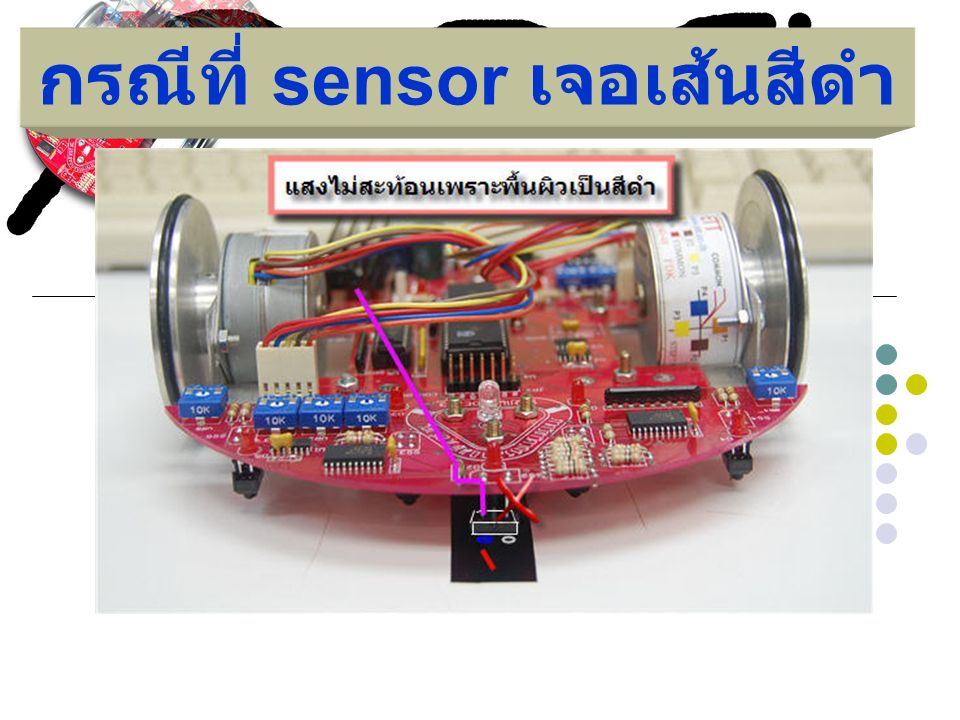
กรณีที่ sensor เจอเส้นสีดำ

24
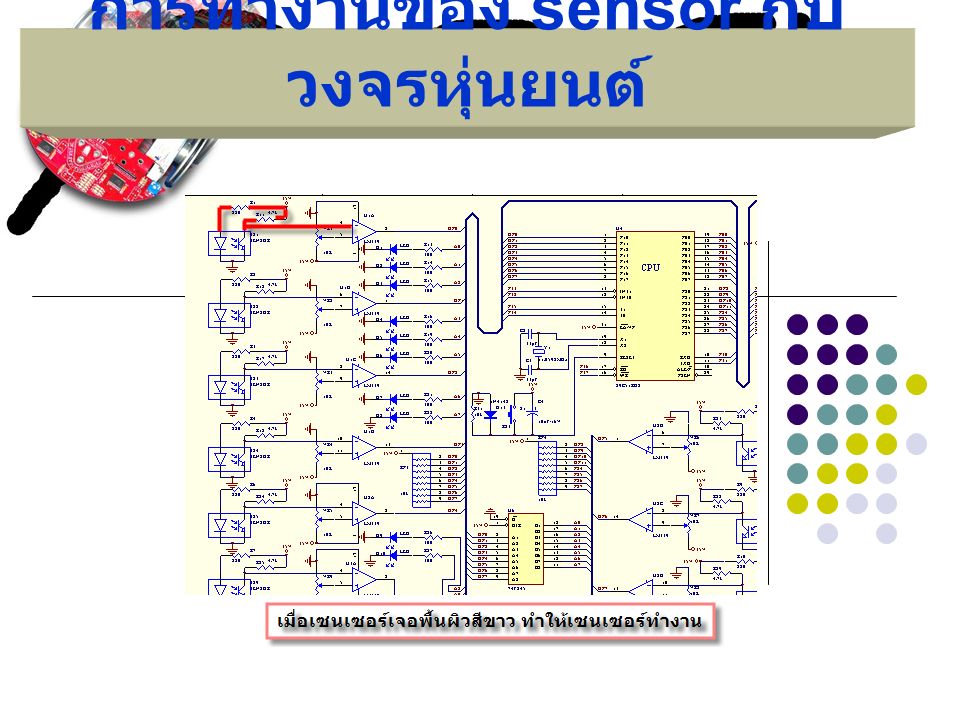
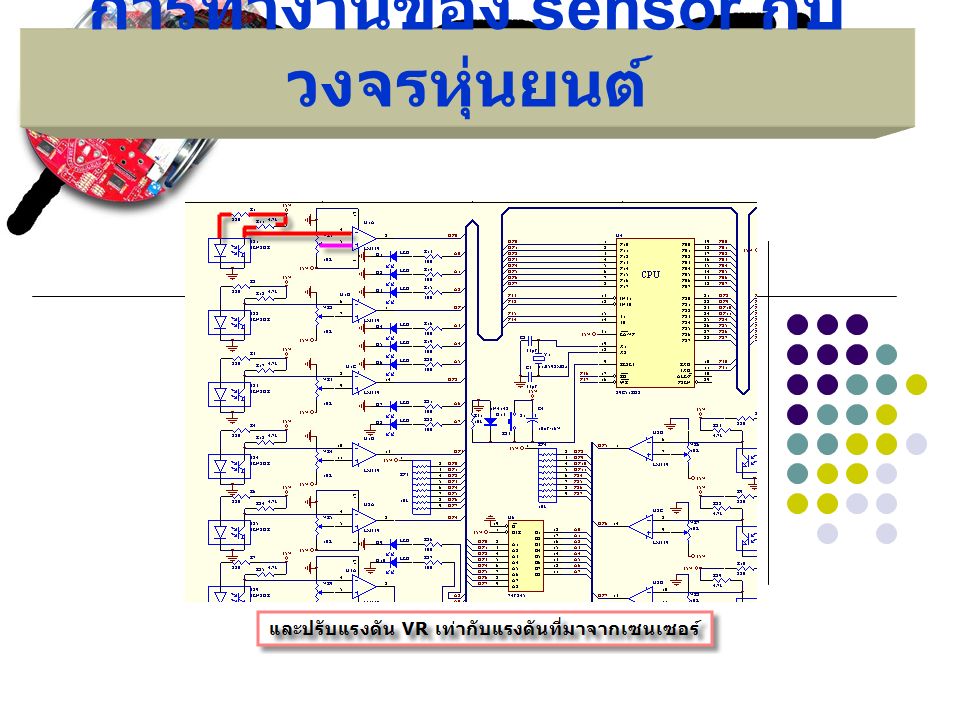
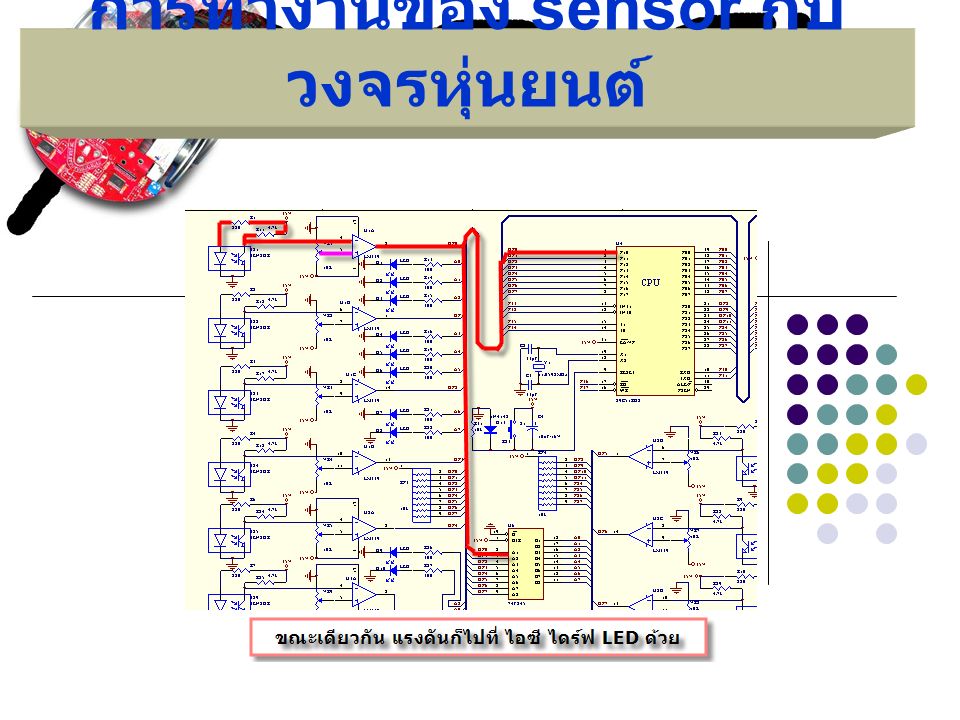
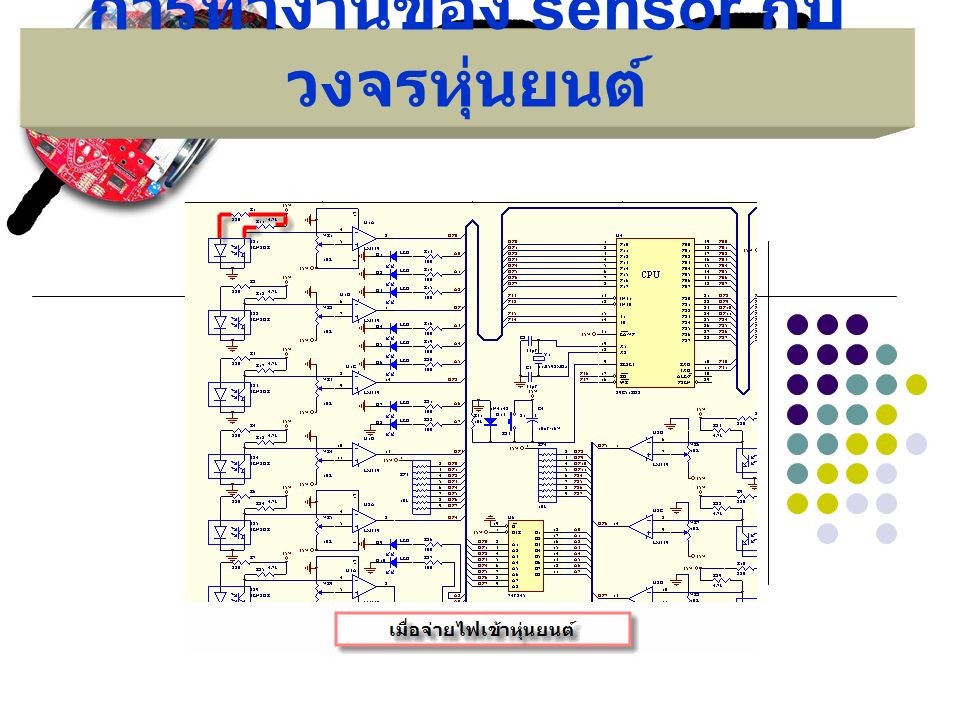
การทำงานของ sensor กับ วงจรหุ่นยนต์

31
ตำแหน่งของ sensor บนตัว หุ่นยนต์ SS1 SS2 SS3 SS4 SS5 ด้านล่าง SS1 SS2 SS3SS4 SS5 ด้านบ น

32
การควบคุมมอเตอร์ การควบคุม มอเตอร์กระแสตรง (DC Motor) มอเตอร์ เป็นเครื่องกลเพื่อ เปลี่ยนพลังงานไฟฟ้าเป็น พลังงานกล โดยการเหนี่ยวนำ แม่เหล็กไฟฟ้า ด้วยส่วนหมุนได้ ที่พันด้วยขดลวด และแม่เหล็กถาวร ผลักขดลวด ทำให้เกิดการหมุน
 มอเตอร์ เป็นเครื่องกลเพื่อ เปลี่ยนพลังงานไฟฟ้าเป็น พลังงานกล โดยการเหนี่ยวนำ แม่เหล็กไฟฟ้า ด้วยส่วนหมุนได้ ที่พันด้วยขดลวด และแม่เหล็กถาวร ผลักขดลวด ทำให้เกิดการหมุน")
33
การควบคุมของความเร็วมอเตอร์ การควบคุม ความเร็วของ มอเตอร์ 1. การควบคุม ความเร็ว โดย การปรับค่า แรงดัน ให้สูง

34
การควบคุมของความเร็วมอเตอร์ การควบคุม ความเร็วของ มอเตอร์ 2. การควบคุม ความเร็ว โดยการ เขียนโปรแกรม PWM (Pulse Wide Modulator)
.")
35
การสั่งงานให้มอเตอร์หมุน ใช้ไอซีไดรเวอร์ วงจรขับโดยไอซีไดรเวอร์ L298 ขับดีซีมอเตอร์

36
การโปรแกรมลงบนตัว หุ่นยนต์

























 Human Brain ความจำ จินตนาการและความสร้างสรรค์>")
>")

