ดาวน์โหลดงานนำเสนอ
1
ตัวเหนี่ยวนำ (Inductor)
")
2
ตัวเหนี่ยวนำส่วนใหญ่จะมีลักษณะเป็นขดลวดทองแดงพันรอบแกนเป็นรูปทรงกระบอกมีปลายเส้นลวด 2 ด้านเป็นขา ดังแสดงในรูป

3
ตัวเหนี่ยวนํา เป็นอุปกรณ์ชิ้นส่วนทางอิเล็กทรอนิกส์ชนิดหนึ่ง ที่ประกอบอยู่ในวงจรเครื่องรับ-ส่งวิทยุ วงจรเครื่องรับโทรทัศน์ วงจรเลือกความถี่ และวงจรอื่นๆที่อาศัยหลักการเหนี่ยวนํา บางครั้งอาจเรียกตัวอินดัคเตอร์ว่า “คอยล์” หรือ “แอล” แทนก็ได้โดยลักษณะโครสร้างของอุปกรณ์ประเภทนี้ คือ การเอาลวดตัวนําทองแดงมาพันเป็นขดจํานวนหลายๆรอบบนแกนอากาศซึ่งขดลวดทองแดงนี้จะแสดงคุณสมบัติเป็นตัวเหนี่ยวนํา ทางไฟฟ้าได้ก็ต่อเมื่อมีกระแสไฟฟ้าไหลผ่านตัวมัน

4
(ก) สัญลักษณ์ของตัวเหนี่ยวนำ
การสะสมพลังงานของตัวเหนี่ยวเกิดขึ้นจากการที่มีกระแสไหลผ่านเข้าไปในขดลวดทำให้เกิดฟลักซ์แม่เหล็กซึ่งจะมีทิศทางไปตามกฎมือขวา (Righthand rule) ซึ่งนิ้วหัวแม่มือของมือขวาถูกวางไปในแนวเดียวกับเส้นลวดโดยชี้ไปตามทิศทางของกระแสแล้ว 4 นิ้วที่เหลือจะแสดงทิศทาง ของฟลักซ์อันเกิดจากเส้นลวด ซึ่งฟลักซ์แม่เหล็กนี้จะคล้องอยู่กับขดลวดโดยการเปลี่ยนแปลงใดๆของฟลักซ์ที่คล้องอยู่จะเหนี่ยวนำให้เกิดแรงดันไฟฟ้า (ก) สัญลักษณ์ของตัวเหนี่ยวนำ (ข) ฟลักซ์แม่เหล็กที่เกิดจากกระแสไหลผ่านเส้นลวดตัวนำ
 ซึ่งนิ้วหัวแม่มือของมือขวาถูกวางไปในแนวเดียวกับเส้นลวดโดยชี้ไปตามทิศทางของกระแสแล้ว 4 นิ้วที่เหลือจะแสดงทิศทาง ของฟลักซ์อันเกิดจากเส้นลวด ซึ่งฟลักซ์แม่เหล็กนี้จะคล้องอยู่กับขดลวดโดยการเปลี่ยนแปลงใดๆของฟลักซ์ที่คล้องอยู่จะเหนี่ยวนำให้เกิดแรงดันไฟฟ้า. (ก) สัญลักษณ์ของตัวเหนี่ยวนำ. (ข) ฟลักซ์แม่เหล็กที่เกิดจากกระแสไหลผ่านเส้นลวดตัวนำ.")
5
ชนิดของตัวเหนี่ยวนำ ตัวเหนี่ยวนำชนิดขดเดียว
1) ตัวเหนี่ยวนำแกนอากาศ (Air Core Inductor) 2) ตัวเหนี่ยวนำแกนผงเหล็กอัด (Powdered - Iron Core Inductor) 3) ตัวเหนี่ยวนำแกนเฟอร์ไรด์ (Ferrite Core Inductor) 4) ตัวเหนี่ยวนำแกนทอรอยด์ (Toroidal Core Inductor) 5) ตัวเหนี่ยวนำแกนเหล็กแผ่น (Laminated - Iron Core Inductor)
 ตัวเหนี่ยวนำแกนอากาศ (Air Core Inductor) 2) ตัวเหนี่ยวนำแกนผงเหล็กอัด (Powdered - Iron Core Inductor) 3) ตัวเหนี่ยวนำแกนเฟอร์ไรด์ (Ferrite Core Inductor) 4) ตัวเหนี่ยวนำแกนทอรอยด์ (Toroidal Core Inductor) 5) ตัวเหนี่ยวนำแกนเหล็กแผ่น (Laminated - Iron Core Inductor)")
6
ตัวเหนี่ยวนำแกนอากาศ (Air Core Inductor)
ตัวเหนี่ยวนำแกนอากาศ เป็นตัวเหนี่ยวนำที่แกนหรือฐานรองทำมาจากวัสดุที่เป็นฉนวน เช่น คาร์บอน พลาสติก ไฟบอร์ และ PVC เป็นต้น หรืออาจพันลอยๆ ไว้โดยไม่มีอะไรรองรับ ตัวเหนี่ยวนำประเภทนี้นิยมนำไปใช้งานกับพวกความถี่สูงๆ หรือความถี่วิทยุ (RF) จึงมักเรียกตัวเหนี่ยวนำประเภทนี้ว่า RF โช้ค ตัวเหนี่ยวนำแกนอากาศเป็นตัวเหนี่ยวนำที่มีค่าความเหนี่ยวนำต่ำ เพราะแกนไม่สามารถช่วยเสริมค่าความเหนี่ยวนำได้ การจะทำให้ค่าความเหนี่ยวนำเพิ่มขึ้นต้องใช้จำนวนรอบในการพันขดลวดเพิ่มขึ้น ลักษณะตัวเหนี่ยวนำแกนอากาศแสดงดังรูป
 จึงมักเรียกตัวเหนี่ยวนำประเภทนี้ว่า RF โช้ค ตัวเหนี่ยวนำแกนอากาศเป็นตัวเหนี่ยวนำที่มีค่าความเหนี่ยวนำต่ำ เพราะแกนไม่สามารถช่วยเสริมค่าความเหนี่ยวนำได้ การจะทำให้ค่าความเหนี่ยวนำเพิ่มขึ้นต้องใช้จำนวนรอบในการพันขดลวดเพิ่มขึ้น ลักษณะตัวเหนี่ยวนำแกนอากาศแสดงดังรูป.")
7
ตัวเหนี่ยวนำชนิดหลายขด
1) หม้อแปลงไฟฟ้าแกนอากาศ (Air - Core Transformer) 2) หม้อแปลงไฟฟ้าแกนเฟอร์ไรต์ (Ferrite - Core Transformer) 3) หม้อแปลงไฟฟ้าแกนเหล็ก (Iron - Core Transformer)
 หม้อแปลงไฟฟ้าแกนอากาศ (Air - Core Transformer) 2) หม้อแปลงไฟฟ้าแกนเฟอร์ไรต์ (Ferrite - Core Transformer) 3) หม้อแปลงไฟฟ้าแกนเหล็ก (Iron - Core Transformer)")
8
การทำงานของตัวเหนี่ยวนำอาศัยสมบัติที่เรียกว่าความเหนี่ยวนำตัวเอง(self-inductance) ปรากฎการณ์การเหนี่ยวนำตนเอง(self-induction) ค้นพบโดยชาวอเมริกัน โจเซฟ เฮนรี (Joseph Henry) ในปีค.ศ. 1832

9
ความเหนี่ยวนำตัวเองหรือนิยมเรียกความเหนี่ยวนำ มีนิยาม
ความเหนี่ยวนำตัวเองหรือนิยมเรียกความเหนี่ยวนำ มีนิยาม ให้ Eback เป็นแรงเคลื่อนไฟฟ้าเหนี่ยวนำที่ต้านการเปลี่ยนของกระแส L คือ ความเหนี่ยวนำ I คือ กระแสในขดลวด t คือ เวลา ดังนั้น

10
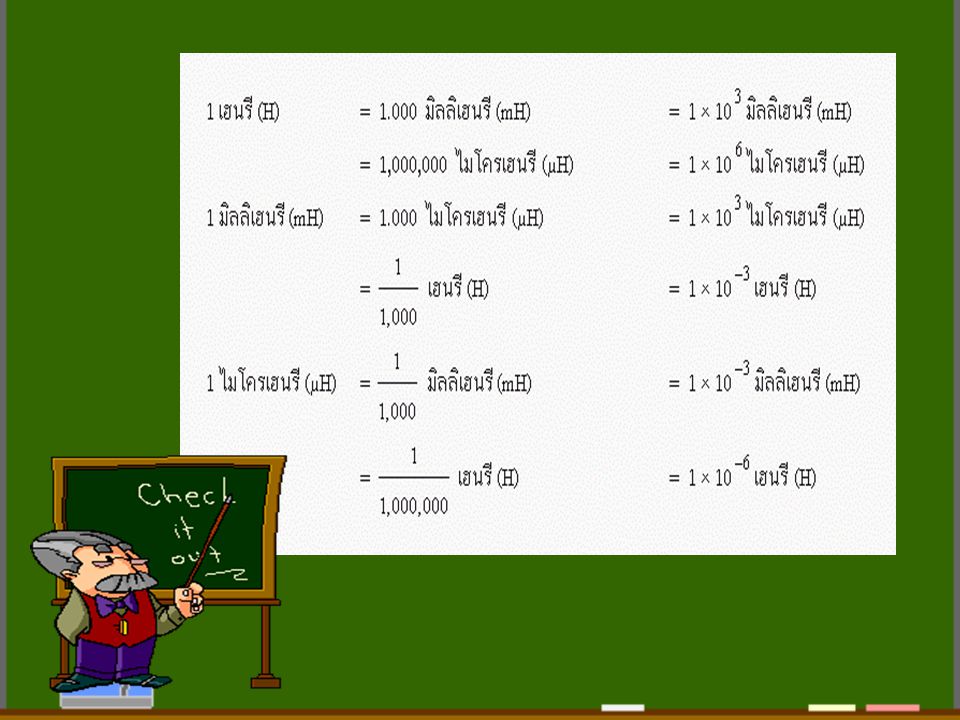
หน่วยความเหนี่ยวนำ ค่าความเหนี่ยวนำมีหน่วยมาตรฐานเป็นเฮนรี่ (Henry ; H) ความหมายของความเหนี่ยวนำ 1 เฮนรี่ คือ ค่ากระแสไหลเข้าไปในขดลวด 1 แอมแปร์ ไหลเปลี่ยนแปลงในเวลา 1 วินาที ทำให้เกิดแรงเคลื่อนไฟฟ้าเหนี่ยวนำด้านกลับ (Counter Electro Motive Force) 1 โวลต์ ตัวเหนี่ยวนำที่ผลิตออกมาใช้งานมีขนาดค่าความเหนี่ยวนำแตกต่างกัน จึงได้เพิ่มหน่วยบอกค่าความเหนี่ยวนำออกเป็นหน่วยย่อยลง คือ มิลลิเฮนรี (Millihener ; mH) และหน่วยไมโครเฮนรี (Microhenry ; µH) หน่วยต่างๆ เขียนความสัมพันธ์กันได้ดังนี้
 ความหมายของความเหนี่ยวนำ 1 เฮนรี่ คือ ค่ากระแสไหลเข้าไปในขดลวด 1 แอมแปร์ ไหลเปลี่ยนแปลงในเวลา 1 วินาที ทำให้เกิดแรงเคลื่อนไฟฟ้าเหนี่ยวนำด้านกลับ (Counter Electro Motive Force) 1 โวลต์ ตัวเหนี่ยวนำที่ผลิตออกมาใช้งานมีขนาดค่าความเหนี่ยวนำแตกต่างกัน จึงได้เพิ่มหน่วยบอกค่าความเหนี่ยวนำออกเป็นหน่วยย่อยลง คือ มิลลิเฮนรี (Millihener ; mH) และหน่วยไมโครเฮนรี (Microhenry ; µH) หน่วยต่างๆ เขียนความสัมพันธ์กันได้ดังนี้")
12
สูตรการคํานวณหาค่าความเหนี่ยวนํา

13
ตัวเหนี่ยวนำในวงจรไฟฟ้ากระแสสลับ
ตัวเหนี่ยวนำไฟฟ้าแท้จริงเป็นเพียงเส้นลวดเส้นหนึ่ง แต่เนื่องจากนำมาทำเป็นขดลวด เมื่อกระแสเปลี่ยนแปลงในขดลวด จะเกิดโวลเตจเหนี่ยวนำที่คร่อมปลายขดลวด ในตัวเหนี่ยวนำ กระแสที่ไหลผ่านขดลวดทำให้เกิดสนามแม่เหล็ก สนามแม่เหล็กนี้สะสมพลังงาน และขณะที่สนามแม่เหล็กเพิ่มขึ้นและลดลง จะเกิดโวลเตจเหนี่ยวนำภายในขดลวดในทิศที่ต้านการเปลี่ยนแปลง เป็นเหตุให้กระแสที่ไหลผ่านขดลวดถูกจำกัด

14
ถ้าเราเขียนกราฟของกระแส (เส้นประ) และโวลเตจ
(เส้นทึบ) ที่เปลี่ยนแปลงกับเวลาในตัวเหนี่ยวนำ เราจะเห็นว่าเมื่อโวลเตจมีค่าสูงสุด กระแสจะเป็นศูนย์ และกระแสมีค่าสูงสุดเมื่อโวลเตจเป็นศูนย์ ดังในรูปทางซ้าย จะเห็นว่า โวลเตจนำหน้ากระแสด้วยมุมเฟส 90 องศา ซึ่งสามารถพิจารณาได้ดังนี้
 ที่เปลี่ยนแปลงกับเวลาในตัวเหนี่ยวนำ เราจะเห็นว่าเมื่อโวลเตจมีค่าสูงสุด กระแสจะเป็นศูนย์ และกระแสมีค่าสูงสุดเมื่อโวลเตจเป็นศูนย์ ดังในรูปทางซ้าย จะเห็นว่า โวลเตจนำหน้ากระแสด้วยมุมเฟส 90 องศา ซึ่งสามารถพิจารณาได้ดังนี้")
15
สรุป จะเห็นว่า ในวงจรไฟฟ้ากระแสสลับที่มีแต่ตัวเหนี่ยวนำ ความต่างศักย์หรือโวลเตจที่จ่ายให้จะนำหน้ากระแสอยู่เป็นมุมเฟส 90 องศา หรือ π /2

16
จบการนำเสนอ





>")



 สมพล พัทจารี วิศวกรรมไฟฟ้า.>")
>")


>")







