ดาวน์โหลดงานนำเสนอ
1
ซอฟต์แวร์ควบคุมหุ่นยนต์อย่างง่าย A Simplified Robot Controlling Software

2
นายนฤนารถ อออิงทรัพย์
ทีมงาน นายจักรี วิญญาณ รหัส นายนฤนารถ อออิงทรัพย์ รหัส

3
Agenda โครงสร้างของการเขียนโปรแกรมบังคับหุ่นยนต์ ลักษณะงานที่ทำ
ผลงานที่ทำ สิ่งที่จะทำต่อไป Demo

4
โครงสร้างของการเขียนโปรแกรมบังคับหุ่นยนต์
วิธีที่ 1

5
โครงสร้างของการเขียนโปรแกรมบังคับหุ่นยนต์(2)
วิธีที่ 2

6
ลักษณะงานที่ทำ

7
ผลงานที่ทำ ออกแบบ “ภาษาอย่างง่าย” สร้าง Compiler ของ “ภาษาอย่างง่าย”
สร้าง Virtual Machine บน Microcontroller

8
ภาษาอย่างง่าย ชุดคำสั่งเป็นภาษาไทย
ตัวอย่างของชุดคำสั่ง “ภาษาอย่างง่าย” เดินหน้า, ถอยหลัง, หยุด, จบ เป็นต้น ตัวอย่างการใช้งาน คำสั่ง [ตัวเลือกต่างๆ] ฿ comment คือ การใช้ line comment

9
ภาษาอย่างง่าย (2) ถอยหลัง หน่วงเวลา 5 หยุด จบ ตัวอย่างโปรแกรม
เดินหน้า หน่วงเวลา 5 ถอยหลัง หน่วงเวลา 5 หยุด จบ

10
Compiler ของ “ภาษาอย่างง่าย”
จะทำการ Compile file ที่มี นามสกุลเป็น “.coe” เช่น test.coe Compile ภาษาอย่างง่าย แล้วสร้าง Hex File สำหรับเก็บ Byte Code ของ Virtual Machine ที่สร้างขึ้น

11
Compiler ของ “ภาษาอย่างง่าย” (2)
C:>coerc test.coe ตัวอย่างโปรแกรม

12
Virtual Machine บน Microcontroller
พัฒนาด้วยภาษา PIC Basic Pro Microcontroller ที่ใช้คือ PIC16F872

13
Virtual Machine บน Microcontroller(2)
หุ่นยนต์ที่ใช้ในการทดลองคือ i-Box v2 PIC16F872 EEPROM

14
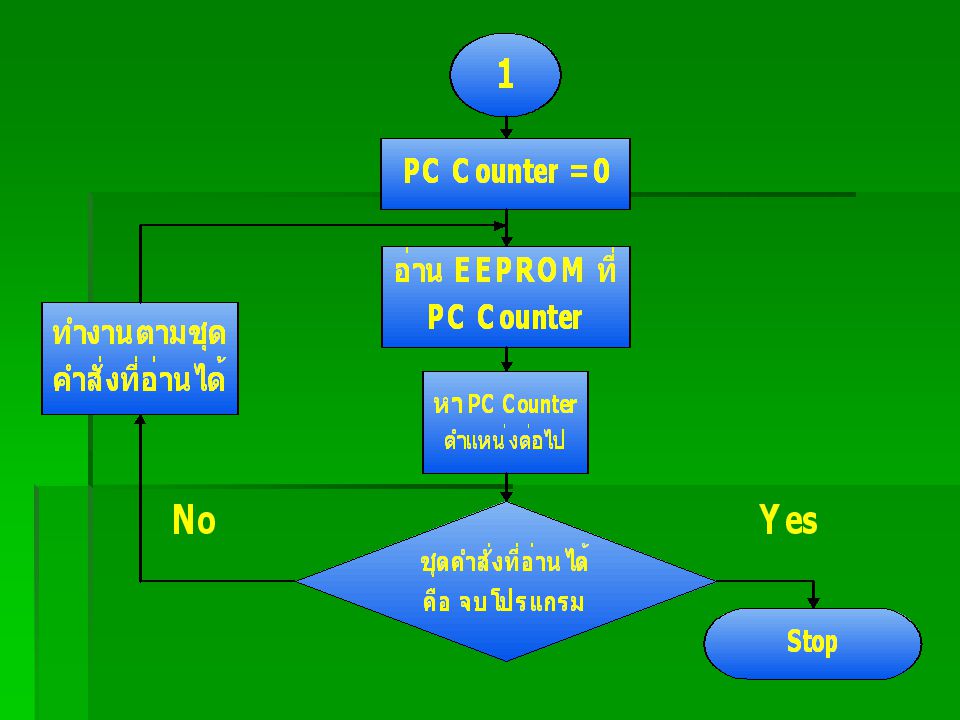
การทำงานของ Virtual Machine

16
ปัญหา ภาษาอย่างง่าย Compiler ของภาษาอย่างง่าย
Virtual Machine บน Microcontroller

17
สิ่งที่จะทำต่อไป ออกแบบชุดของคำสั่งของภาษาอย่างง่าย (ต่อ)
พัฒนา Compiler ของภาษาอย่างง่าย (ต่อ) พัฒนา Virtual Machine บน Microcontroller (ต่อ) พัฒนา EEPROM Programmer โดยใช้ Infrared ในการติดต่อ
 พัฒนา Virtual Machine บน Microcontroller (ต่อ) พัฒนา EEPROM Programmer โดยใช้ Infrared ในการติดต่อ.")
18
DEMO


>")

>")










 คณะผู้พัฒนา นางสาวลออศรี ใจชื่น รหัส 443040909-2 นางสาวศิริรัตน์ บุตรดี รหัส 443040971-1.>")





