ดาวน์โหลดงานนำเสนอ
1
INC341 Steady State Error Lecture 6

2
Transient Response Output ในแบบ อุดมคติ Output If it has ‘dynamics’
ถ้าเราป้อน step input เข้าไปในระบบ เราจะได้ output หลายๆแบบ Output ในแบบ อุดมคติ Output If it has ‘dynamics’ there will be a transient time

3
นิยาม steady-state error
Steady-state error is the difference between a prescribed input And output as t →∞ Desired Actual Steady-state error t มาก Transient หายไป

4
Level Time ลองคิดดูถ้าลิฟท์ (elevator) มี response แบบนี้ อะไรละ
ที่ก่อให้เกิด ช่องว่างตรงนี้ desired Actual Level Time

5
Input Type

6
Steady-state Error with different type of inputs

7
Error Signal error = input – output
จะวิเคราะห์ error ก็จะทำให้ error ให้เป็น signal T(s) Error signal =?
 Error signal =")
8
ค่านี้เลยคือ steady state error
แต่ แต่ Add summing junction Unity feedback ค่านี้เลยคือ steady state error

9
Final Value Theorem The value of a function f(t) as t goes to infinity (its final value) is related to the Laplace transform F(s) by: พบว่าสดวกในการใช้หา steady-state error ใน time-domain เพราะไม่ต้องทำการ แปลง inverse Laplace

10
Example: Unity Feedback System
steady state error R(s) E(s) C(s) + - What is e(t) in limit as t goes to infinity when r(t) is a step? r(t) is a ramp?
 E(s) C(s) + - What is e(t) in limit as t goes to infinity when. r(t) is a step r(t) is a ramp")
11
L.T. of Step input Step input: Au(t) ใช้ Final-value Theorem
แล้วแทนค่า G(s)
")
12
L.T. of Ramp input Ramp input: Atu(t) ใช้ Final-value Theorem
แล้วแทนค่า G(s)
")
13
Error from Different Inputs
Zero Steady State error requires Implications on G(s) Step: Ramp: Parabola:
 Step: Ramp: Parabola:")
14
System Type System type = p Transfer function จะมีรูปแบบ Type 0 Type 1

15
System type - Examples Type 0 Type 1 Type 2 One pole at s = 0
Two poles at s = 0

16
Static Error Constant Position constant Velocity constant
Acceleration constant

17
Relationship with System Type

18
Example หา error จาก input แบบ step, ramp, parabolic Type 1

19
Design Problem Find the value of K so that there is 10 % error in the steady state

20
System is type 1, Error is from Ramp input

21
Steady-State Error for Nonunity Feedback System
จะจัดรูป Block ให้เป็น Unity feedback

22
Example หา system type และ steady state error

23
เป็น type 0

24
Sensitivity คือความไวของการเปลี่ยนแปลง parameter หนึ่งต่อการเปลี่ยนแปลงของอีก parameter หนึ่ง ความไวของ F เมื่อเทียบกับการเปลี่ยนแปลงของ P นิยามโดย

25
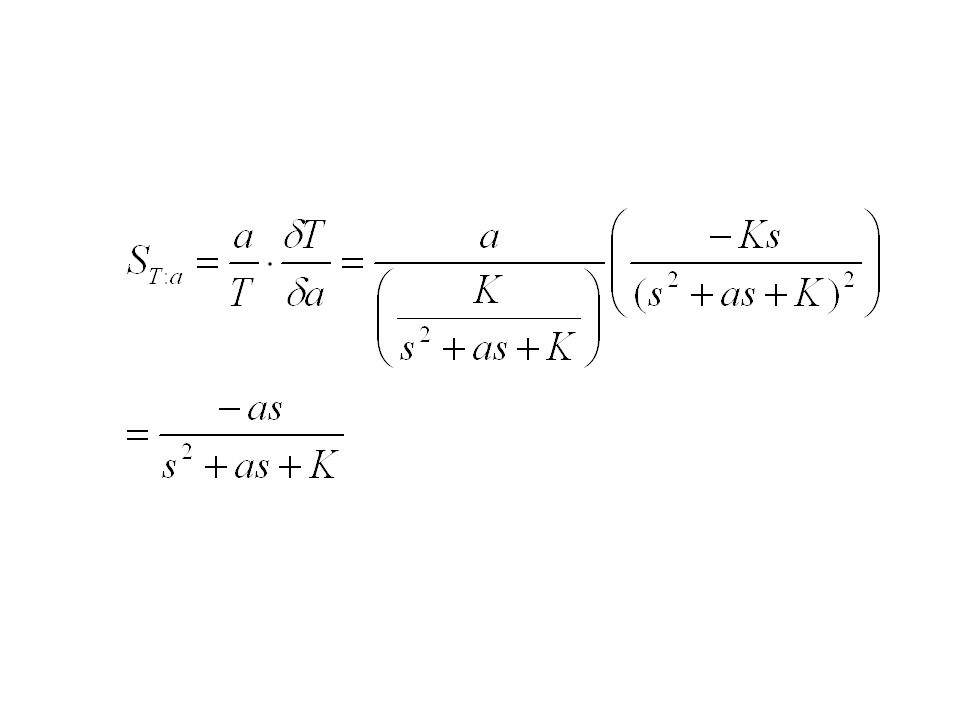
Example จงหาความไวของ closed-loop transfer function ต่อการเปลี่ยนแปลงของ a

27
Example จงหาความไวของ steady-state error จาก ramp inputs ต่อการเปลี่ยนแปลงของ a และ K Steady-state error Sensitivity of error to changes of a Sensitivity of error to changes of K




![คำสั่ง DISPLAY รูปแบบที่ 1 DISPLAY identifier-1, identifier-2 … literal-1 literal-2 [ UPON mnemonic-name ] ตัวอย่าง DISPLAY STUDENT-NAME. DISPLAY.](/7/1925791/big_thumb.jpg "คำสั่ง DISPLAY รูปแบบที่ 1 DISPLAY identifier-1, identifier-2 … literal-1 literal-2 [ UPON mnemonic-name ] ตัวอย่าง DISPLAY STUDENT-NAME. DISPLAY.>")








 3 วิธี 1. Distribution.>")






>")
