ดาวน์โหลดงานนำเสนอ
งานนำเสนอกำลังจะดาวน์โหลด โปรดรอ

1
PIC Code Execution II http://mango.e-cpe.org

2
PIC B0 B1 B2 B3 B4 B5 B6 B7

3
Memory Mapped I/O (MMIO) BSF06.0 BCF06.0 BSF = Bit Set File, BCF = Bit Clear File
 BSF06.0 BCF06.0 BSF = Bit Set File, BCF = Bit Clear File")
4
ข้อดีข้อเสียของ Memory Mapped I/O ไม่ต้องออกแบบคำสั่งเฉพาะสำหรับ I/O MOVWF 06 MOVWF 21 I/O Operation Mem Operation

5
ข้อดีข้อเสียของ Memory Mapped I/O Memory Mapped I/O ใช้คำสั่งชุดเดียวในการเข้าถึง Memory และอุปกรณ์รอบข้าง ช่วยลดความซับซ้อนของ CPU ทำให้ราคาถูกลง และ ใช้ งานได้ง่าย Memory MappedPort-Mapped With some exceptions

6
ข้อดีข้อเสียของ Memory Mapped I/O แต่ก็ต้องเสียตำแหน่งใน Memory ไปบางส่วน เช่น PIC16F886 จะเสียพื้นที่ไป 128 Byte จากทั้งหมด 368 Bytes (~35%) เพื่อใช้ทำ Memory Mapped I/O 128 Bytes I/O Mapped 240 Bytes Available RAM
 เพื่อใช้ทำ Memory Mapped I/O 128 Bytes I/O Mapped 240 Bytes Available RAM")
7
3.x GB?? 4 GB The 3 Gig RAM Problem 32 bit OS InstalledUsable ระบบ 32 บิตควรใช้งาน RAM ได้ 2^32 = 4GB พอดี แต่ ทำไมในความเป็นจริง กลับใช้ได้แค่ 3.x GB

8
The 3 Gig RAM Problem ~1 GB 3 GB Address Space Video Card BIOS PCI Bus Etc. RAM (4 GB) ที่อยู่ของหน่วยความจำส่วนบนถูกเอาไปใช้สำหรับ I/O
 ที่อยู่ของหน่วยความจำส่วนบนถูกเอาไปใช้สำหรับ I/O.")
9
ข้อดีข้อเสียของ Memory Mapped I/O ถ้า Memory และ I/O ใช้ data bus เดียวกัน อาจทำให้ Memory Access ช้าลง เนื่องจากต้องรอคำสั่ง I/O ที่ทำงานช้ากว่า MOVWF 06 MOVWF 21 Slow I/O Operation Fast Mem Operation

10
Port Mapped I/O (PMIO) ใช้คำสั่งแยกกันระหว่าง Memory Operation กับ Peripheral Operation ปัจจุบัน CPU ที่ใช้ Port Mapped I/O มักใช้ Memory Mapped I/O ควบคู่กันไปด้วย
 ใช้คำสั่งแยกกันระหว่าง Memory Operation กับ Peripheral Operation ปัจจุบัน CPU ที่ใช้ Port Mapped I/O มักใช้ Memory Mapped I/O ควบคู่กันไปด้วย")
11
ข้อดี / เสียของ Port Mapped I/O การใช้คำสั่งเฉพาะทางทำให้ประสิทธิภาพ โดยรวมดีกว่า แต่ CPU จะมีความซับซ้อนที่สูงขึ้นจากคำสั่งที่ เพิ่มขึ้นมาเหล่านี้ การใช้งานยากขึ้นสำหรับผู้พัฒนา PIC 16FIntel x86 35 Instructions1,000+ Instructions* * See http://en.wikipedia.org/wiki/X86_instruction_listings

12
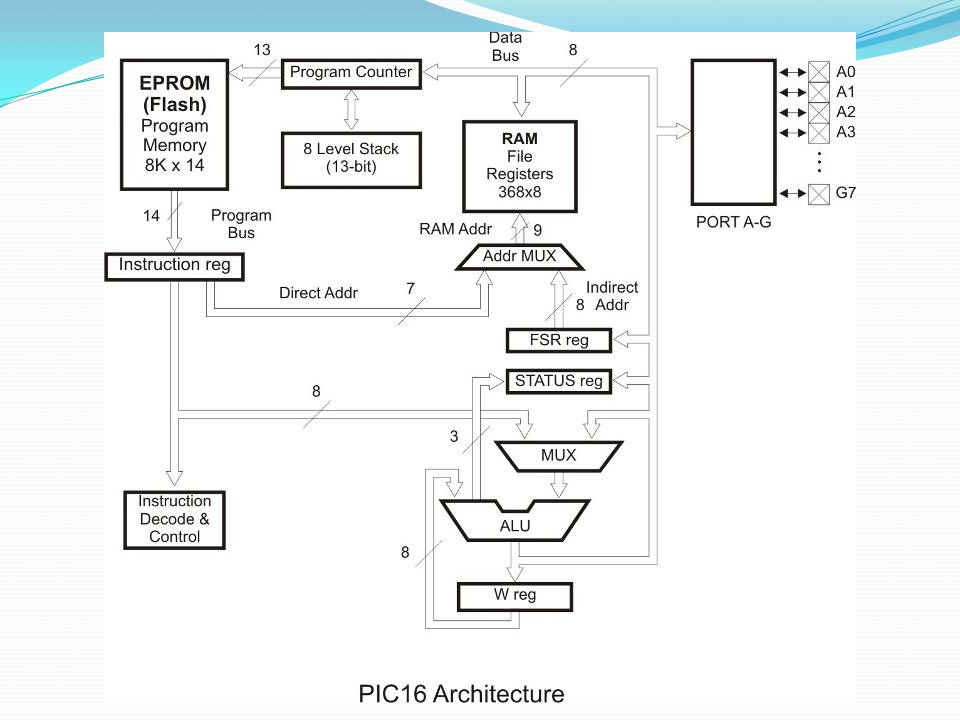
Memory Mapped I/O Case Study PIC 16F, Tri-state I/O, Memory Organization

13
Look at the complete ASM code for output_high(PIN_B0).................... output_high(PIN_B0); 00ED: BSF 03.5 00EE: BCF 06.0 00EF: BCF 03.5 00F0: BSF 06.0 Q: Why do we need these commands? A: Before using a PIN on the PIC, we need to configure it’s direction
; 00ED: BSF EE: BCF EF: BCF F0: BSF 06.0 Q: Why do we need these commands. A: Before using a PIN on the PIC, we need to configure it’s direction.")
14
Each MCU PIN can be in 3 states (Tri-State) StateDescription HighThe pin sources 5V LowThe pin sinks to GND High ImpedanceThe pin is an input Output Mode Input Mode
 StateDescription HighThe pin sources 5V LowThe pin sinks to GND High ImpedanceThe pin is an input Output Mode Input Mode")
15
Tri-state PIN configuration Telling the MCU which mode we want to use an IO pin 0 = Output 1 = Input

16
.................... output_high(PIN_B0); 00EE: BCF 86.0 -> Clear bit 0 of TRISB 00F0: BSF 06.0 -> Set bit 0 of PORTB.................... output_high(PIN_B0); 00ED: BSF 03.5 00EE: BCF 06.0 00EF: BCF 03.5 00F0: BSF 06.0 So, the code should be like this … But why is it like this?
; 00EE: BCF > Clear bit 0 of TRISB 00F0: BSF > Set bit 0 of PORTB output_high(PIN_B0); 00ED: BSF EE: BCF EF: BCF F0: BSF 06.0 So, the code should be like this … But why is it like this .")
17
The problem with “BCF 86.0” 0x86 = 1000 0110 The space for the file register address is limited to 7 bits

18
Status Register (Address 03) See section “Register 5-1” in the handout for details of the Status Register Bit 6,7 ใช้เลือก Register Bank 00 = Bank 0 01 = Bank 1 10 = Bank 2 11 = Bank 3
 See section Register 5-1 in the handout for details of the Status Register Bit 6,7 ใช้เลือก Register Bank 00 = Bank 0 01 = Bank 1 10 = Bank 2 11 = Bank 3")
19
Bank 0 Bank 1Bank 2 Bank 3

20
แบบฝึกหัด – ทำไฟวิ่งบน PIC Simulator IDE ; set PORTB as output bsf status,5 bcf status,6 movlw 0 movwf trisb ; disable Analog inputs bsf status,6 movwf 0x9 ; switch to FSR Bank 0 bcf status,5 bcf status,6 bsf portb,0 ; trun on LED on B0 กำหนดโปรแกรมส่วนต้นให้เพื่อ setup ระบบดังนี้

21
The RLF command Rotates the bits in a file register through the carry bit RLF Example: MOVLW1 MOVWF0x6 ; RAM value = 0000 0001 2 RLF 0x6,F ; value is now 0000 0010 2

22
Status Register (Address 03) Carry Bit = จะรับบิตที่เกินออก มาทางซ้ายของ W register See section “Register 5-1” in the handout for details of the Status Register
 Carry Bit = จะรับบิตที่เกินออก มาทางซ้ายของ W register See section Register 5-1 in the handout for details of the Status Register")
23
PIC-C Trick: RAM access #byte b_port = 6 // mem pointer #bit B0 = b_port.0 b_port = 0xff; // drive port b B0 = 1; // set bit B0 to 1

25
Methods Write Machine Code Manually Write Assembly Code Use a High-Level Compiler

26
Writing Machine Code ENIAC

28
Benefits of High-Level Compilers Poor optimization Non-Optimal Hardware Utilization Drawbacks of High-Level Compilers Simple for the programmer Reduce development time Allows for the development of larger programs Easier to port to different hardware systems

29
Poor Optimazation.................... while (1).................... output_b(i); Loop: BSF 03.5 CLRF 06 BCF 03.5 MOVF 21,W MOVWF 06 GOTO Loop No need to set TRIS bits every time
; Loop: BSF 03.5 CLRF 06 BCF 03.5 MOVF 21,W MOVWF 06 GOTO Loop No need to set TRIS bits every time.")
30
Poor Optimization Ex 2.................... int i;.................... i = 5; 000D: MOVLW 05 000E: BCF 03.5 000F: MOVWF 21.................... do {.................... i--; 0010: DECF 21,F.................... } while (i>0); 0011: MOVF 21,F 0012: BTFSS 03.2 0013: GOTO 010 DECF already sets the Z bit
; 0011: MOVF 21,F 0012: BTFSS : GOTO 010 DECF already sets the Z bit.")
31
Non-Optimal HW Utilization Blinking LED example Our code from exercise BSF06.0 Loop: RLF06 GoTo Loop Code generated by PIC-C Loop: BCF 03.5 MOVF 0x21,W MOVWF 06 RLF 0x21, F GOTO Loop

งานนำเสนอที่คล้ายกัน
 ในช่วงยุค Internet เพิ่ง เริ่มต้น เป็นบริษัทที่ดำเนินงานทางด้าน.>")

 2007 Pearson Education, Inc. All rights reserved. 0-13-222158-61 Java Programming Language.>")

![คำสั่ง DISPLAY รูปแบบที่ 1 DISPLAY identifier-1, identifier-2 … literal-1 literal-2 [ UPON mnemonic-name ] ตัวอย่าง DISPLAY STUDENT-NAME. DISPLAY.](/7/1925791/big_thumb.jpg "คำสั่ง DISPLAY รูปแบบที่ 1 DISPLAY identifier-1, identifier-2 … literal-1 literal-2 [ UPON mnemonic-name ] ตัวอย่าง DISPLAY STUDENT-NAME. DISPLAY.>")


>")







>")



