ดาวน์โหลดงานนำเสนอ
งานนำเสนอกำลังจะดาวน์โหลด โปรดรอ

1
เส้นตรงและระนาบในสามมิติ (Lines and Planes in Space)
ในการคำนวณทางเรขาคณิตในระบบสามมิติมักจะเริ่มต้น ด้วยการศึกษาเกี่ยวกับเส้นตรงและระนาบ โดยในการศึกษา เรื่องนี้จะใช้รากฐานความรู้ในเรื่องผลคูณเชิงสเกลาร์และ ผลคูณเชิงเวกเตอร์เป็นหลัก ความรู้ในเรื่องเส้นตรงและ ระนาบ สามารถนำไปประยุกต์เพื่อศึกษาเกี่ยวกับเส้นโค้ง ในสามมิติต่อไป

2
ขนานกัน ถ้า v เป็นเวกเตอร์ใดๆ ที่ขนานกับเส้นตรง L แล้ว

3
The standard parametric equation of the line.
เราเรียกสมการทั้งสาม นี้ว่า สมการอิงตัวแปรเสริมมาตรฐานสำหรับเส้นตรง The standard parametric equation of the line.

4
P0(x0,y0 ,z0) และขนานกับเวกเตอร์ v=<v1, v2, v3>
หมายเหตุ สมการอิงตัวแปรเสริมสำหรับเส้นตรงที่ผ่านจุด P0(x0,y0 ,z0) และขนานกับเวกเตอร์ v=<v1, v2, v3> เป็นไปได้หลายสมการ!!!
 และขนานกับเวกเตอร์ v=<v1, v2, v3> เป็นไปได้หลายสมการ!!!")
5
ระนาบในสามมิติ ระนาบ xy ระนาบ xz ระนาบ yz

6
เวกเตอร์แนวฉาก (normal vector)
เรียกเวกเตอร์ที่ตั้งฉากกับระนาบว่า เวกเตอร์แนวฉาก (normal vector)
")
7
และเวกเตอร์ดังกล่าวต้องตั้งฉากกับ normal vector <A,B,C>
ดังนั้น จะได้ว่า

8
ดังนั้นสมการระนาบคือ
หรือ หรือ เมื่อ

9
ฟังก์ชันเชิงเวกเตอร์ และ เส้นโค้งใน 3 มิติ
(Vector-Valued Functions and Space Curves) จากแนวคิดเรื่องเวกเตอร์ และ สมการอิงตัวแปรเสริมสำหรับ เส้นตรงใน 3 มิติ เราสามารถขยายแนวความคิดไปสู่ สมการ อิงตัวแปรเสริมสำหรับเส้นโค้งและสมการอิงตัวแปรเสริม ในรูปแบบเวกเตอร์ ซึ่งสามารถนำความรู้นี้ไปใช้อธิบาย ปรากฏการณ์หลายๆ อย่างในฟิสิกส์และวิศวกรรมได้
 จากแนวคิดเรื่องเวกเตอร์ และ สมการอิงตัวแปรเสริมสำหรับ. เส้นตรงใน 3 มิติ เราสามารถขยายแนวความคิดไปสู่ สมการ. อิงตัวแปรเสริมสำหรับเส้นโค้งและสมการอิงตัวแปรเสริม. ในรูปแบบเวกเตอร์ ซึ่งสามารถนำความรู้นี้ไปใช้อธิบาย. ปรากฏการณ์หลายๆ อย่างในฟิสิกส์และวิศวกรรมได้")
10
The standard parametric equation of the line.
สมการอิงตัวแปรเสริมมาตรฐานสำหรับเส้นตรง The standard parametric equation of the line.

11
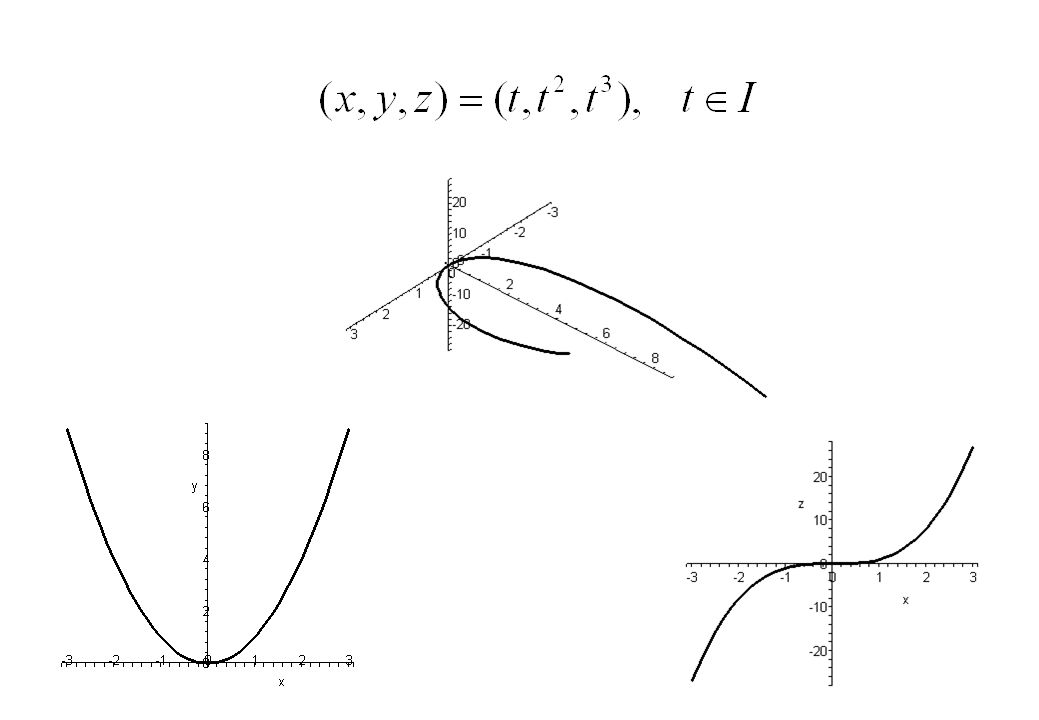
The parametric equation of the curves
สมการอิงตัวแปรเสริมสำหรับเส้นโค้ง The parametric equation of the curves โดยที่ I เป็นช่วงที่พิจารณา

12
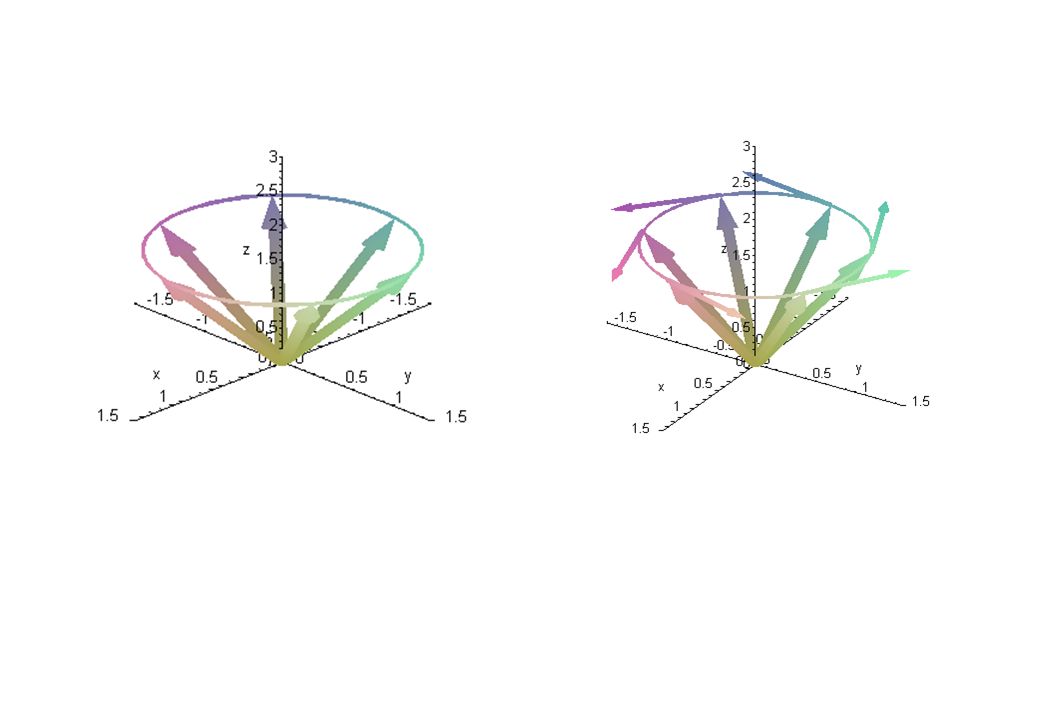
จุด ทำให้เกิดเส้นโค้งในสามมิติเช่น สมการเกลียว หรือ เฮลิกซ์ (helix)
")
14
เราสามารถสร้างเวกเตอร์บอกเส้นทางการเคลื่อนที่ของจุด
ได้คือ หรือ

15
ถ้าฟังก์ชัน มีความต่อเนื่องที่จุด เวกเตอร์ มีความต่อเนื่องที่จุด ด้วย

16
จงหาค่าลิมิตของ ณ จุด

17
ถ้าฟังก์ชัน สามารถหาอนุพันธ์ที่จุด เวกเตอร์ สามารถหาอนุพันธ์ที่จุด ด้วย

19
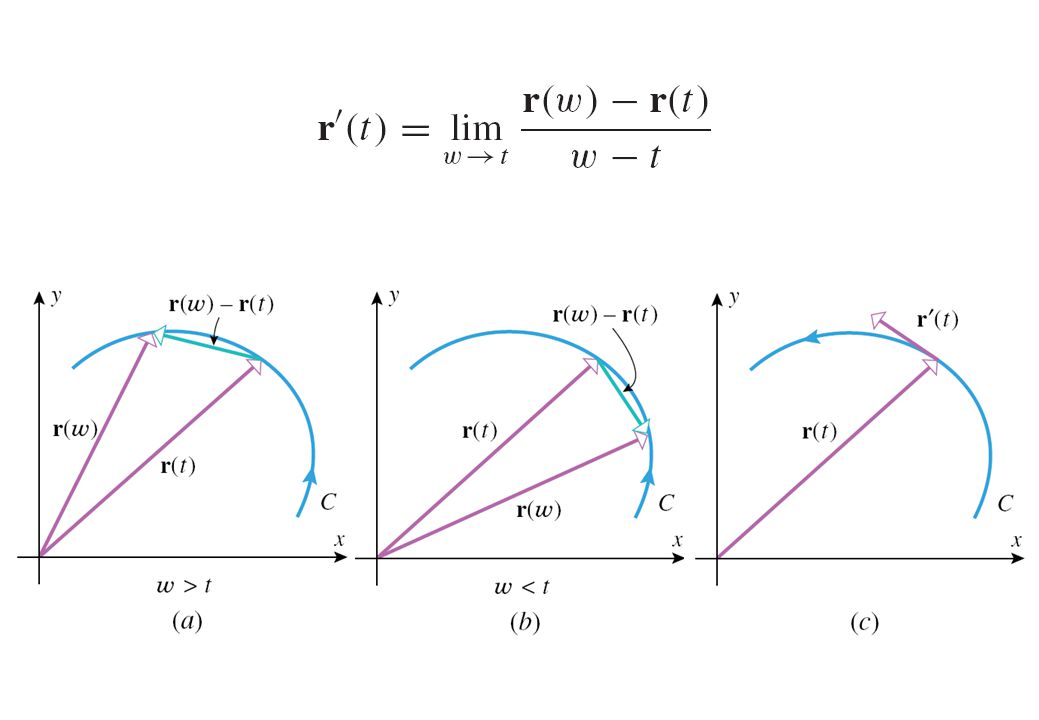
ถ้าเวกเตอร์ สามารถหาอนุพันธ์ที่จุด t ใดบนโดเมนแล้ว
และมีความหมายในเชิงเรขาคณิต คือ เป็นเวกเตอร์ ซึ่งขนานกับเส้นสัมผัสกับเส้นโค้งดังกล่าว ณ จุด t

20
ความหมายของอนุพันธ์ของ r(t) ในเชิงฟิสิกส์
หมายถึง ความเร็ว (velocity)ของวัตถุนั้น มักใช้สัญลักษณ์ v(t) หมายถึง อัตราเร็ว (speed)ของวัตถุ มักใช้สัญลักษณ์ s(t) หมายถึง ทิศทางการเคลื่อนที่ของวัตถุ
ของวัตถุนั้น. มักใช้สัญลักษณ์ v(t) 2. หมายถึง อัตราเร็ว (speed)ของวัตถุ มักใช้สัญลักษณ์ s(t) 3. หมายถึง ทิศทางการเคลื่อนที่ของวัตถุ")
21
ความหมายของอนุพันธ์ของ r(t) ในเชิงฟิสิกส์
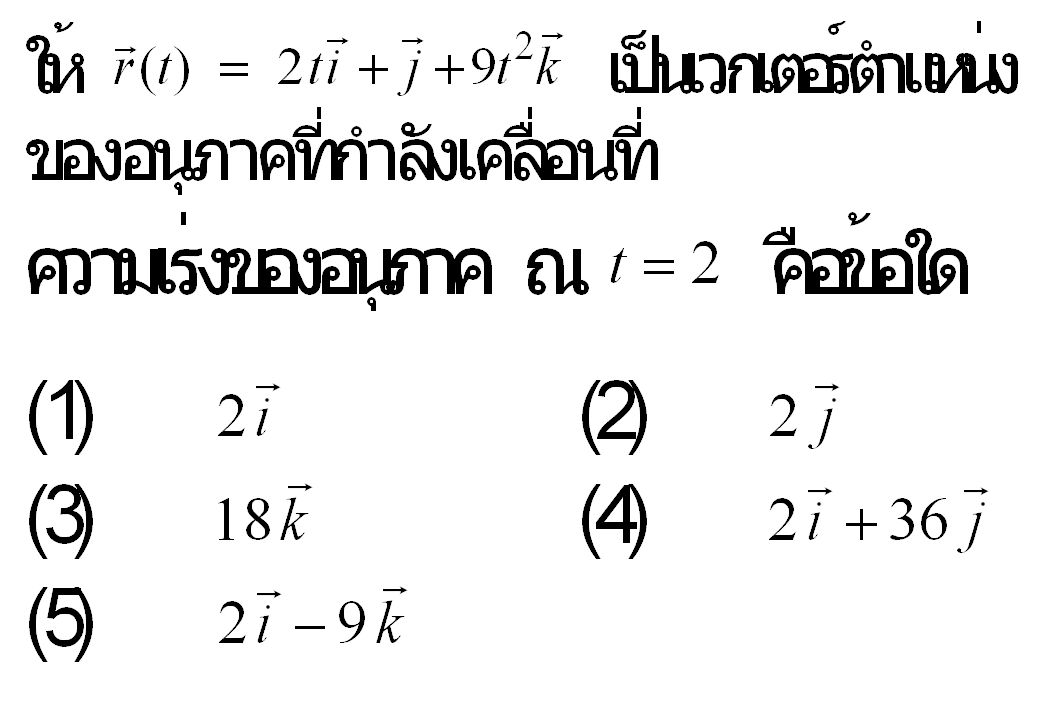
หมายถึง ความเร่ง (acceleration)ของวัตถุนั้น มักใช้สัญลักษณ์ a(t) หมายถึง อัตราเร่ง ของวัตถุ เรียกว่า Jerk (Jerk - การกระตุก)
ของวัตถุนั้น. มักใช้สัญลักษณ์ a(t) 5. หมายถึง อัตราเร่ง ของวัตถุ 6. เรียกว่า Jerk (Jerk - การกระตุก)")
22
ให้ r(t) แทนตำแหน่งของวัตถุที่เวลา t ใดๆ
จงหาความเร็ว, อัตราเร็ว,ความเร่ง และอัตราเร่งของวัตถุดังกล่าว 1. 2. 3.

23
ให้ r(t) แทนตำแหน่งของวัตถุที่เวลา t ใดๆ
1. 2.

27
กฎการหาอนุพันธ์ของฟังก์ชันเชิงเวกเตอร์
1. ถ้า C เป็นเวกเตอร์ที่คงตัวแล้ว เวกเตอร์ 0 2. ถ้า เป็นค่าคงตัวใดๆ แล้ว

28
ฟังก์ชันของ t (ไม่ใช่เวกเตอร์)
")
29
4. อนุพันธ์ของผลบวกเวกเตอร์ = ผลบวกของเวกเตอร์อนุพันธ์
5. อนุพันธ์ของผลต่างเวกเตอร์ = ผลต่างของเวกเตอร์อนุพันธ์

30
สเกลาร์ (ฟังก์ชันของ t)
6. อนุพันธ์ของผลคูณเชิงสเกลาร์ (dot product) เวกเตอร์ สเกลาร์ (ฟังก์ชันของ t)
 เวกเตอร์ สเกลาร์ (ฟังก์ชันของ t)")
31
7. อนุพันธ์ของผลคูณเชิงเวกเตอร์ (cross product)
ห้ามสลับตำแหน่ง ห้ามสลับตำแหน่ง เวกเตอร์

32
8. กฎลูกโซ่ (chain rule)
")
35
ให้ u = <u1(t), u2(t), u3(t)>, v = <v1(t), v2(t), v3(t)>,
w = <w1(t), w2(t), w3(t)> จงหา
, w2(t), w3(t)> จงหา.")
36
จงแสดงว่า

37
|r(t)|=c |r(t)|= ฟังก์ชันเชิงเวกเตอร์ที่มีความยาวคงตัว
|=c |r(t)|= ฟังก์ชันเชิงเวกเตอร์ที่มีความยาวคงตัว")
39
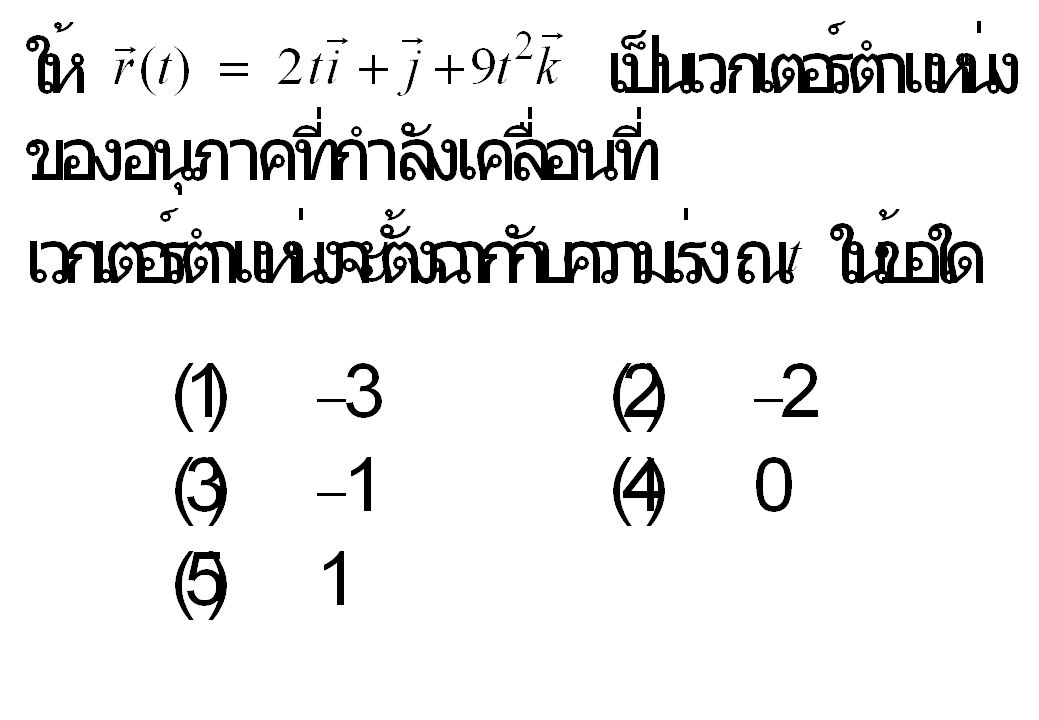
เราพบว่าฟังก์ชันเชิงเวกเตอร์ที่มีความยาวคงตัวมีคุณสมบัติคือ
นั่นแสดงให้เห็นว่า ถ้าฟังก์ชันเชิงเวกเตอร์ที่มีความยาวคงตัว ฟังก์ชันดังกล่าวและอนุพันธ์ของฟังก์ชันต้องตั้งฉากกัน

40
จงแสดงว่าฟังก์ชันเชิงเวกเตอร์
มีความยาวคงตัว

43
ให้ r(t) ฟังก์ชันเชิงเวกเตอร์ จงหา
เมื่อ สำหรับทุกๆ ค่า t

44
ให้ r(t) แทนตำแหน่งของวัตถุที่เวลา t ใดๆ
จงหาความเร็ว, อัตราเร็ว,ความเร่ง,อัตราเร่งและทิศทางการเคลื่อนที่ ของวัตถุดังกล่าว เมื่อ t=1

งานนำเสนอที่คล้ายกัน





.>")

![อินทิกรัลตามเส้น เป็นการหาปริพันธ์ของฟังก์ชันบน [a,b] จะศึกษาเรื่อง](/7/1949775/big_thumb.jpg "อินทิกรัลตามเส้น เป็นการหาปริพันธ์ของฟังก์ชันบน [a,b] จะศึกษาเรื่อง>")
>")












